- Cinemática
-
La Cinemática (del griego κινεω, kineo, movimiento) es la rama de la mecánica clásica que estudia las leyes del movimiento de los cuerpos sin tener en cuenta las causas que lo producen, limitándose, esencialmente, al estudio de la trayectoria en función del tiempo.
En la Cinemática se utiliza un sistema de coordenadas para describir las trayectorias, denominado sistema de referencia. La velocidad es el ritmo con que cambia la posición un cuerpo. La aceleración es el ritmo con que cambia su velocidad. La velocidad y la aceleración son las dos principales cantidades que describen cómo cambia su posición en función del tiempo.
Historia
Los primeros conceptos sobre Cinemática se remontan al siglo XIV, particularmente aquellos que forman parte de la doctrina de la intensidad de las formas o teoría de los cálculos (calculationes). Estos desarrollos se deben a científicos como William Heytesbury y Richard Swineshead, en Inglaterra, y a otros, como Nicolás Oresme, de la escuela francesa.
Hacia el 1604, Galileo Galilei hizo sus famosos estudios del movimiento de caída libre y de esferas en planos inclinados a fin de comprender aspectos del movimiento relevantes en su tiempo, como el movimiento de los planetas y de las balas de cañón.[1] Posteriormente, el estudio de la cicloide realizado por Evangelista Torricelli (1608-47), va configurando lo que se conocería como Geometría del Movimiento.
El nacimiento de la Cinemática moderna tiene lugar con la alocución de Pierre Varignon el 20 de enero de 1700 ante la Academia Real de las Ciencias de París.[2] En esta ocasión define la noción de aceleración y muestra cómo es posible deducirla de la velocidad instantánea con la ayuda de un simple procedimiento de cálculo diferencial.
En la segunda mitad del siglo XVIII se produjeron más contribuciones por Jean Le Rond d'Alembert, Leonhard Euler y André-Marie Ampère, continuando con el enunciado de la ley fundamental del centro instantáneo de rotación en el movimiento plano, de Daniel Bernoulli (1700-1782).
El vocablo Cinemática fue creado por André-Marie Ampère (1775-1836), quien delimitó el contenido de la Cinemática y aclaró su posición dentro del campo de la Mecánica. Desde entonces y hasta nuestros días la Cinemática ha continuado su desarrollo hasta adquirir una estructura propia.
Con la Teoría de la relatividad especial de Albert Einstein en 1905 se inició una nueva etapa, la Cinemática relativista, donde el tiempo y el espacio no son absolutos, y sí lo es la velocidad de la luz.
Elementos básicos de la Cinemática
Los elementos básicos de la Cinemática son: espacio, tiempo y móvil.
En la Mecánica Clásica se admite la existencia de un espacio absoluto; es decir, un espacio anterior a todos los objetos materiales e independiente de la existencia de estos. Este espacio es el escenario donde ocurren todos los fenómenos físicos, y se supone que todas las leyes de la física se cumplen rigurosamente en todas las regiones del mismo. El espacio físico se representa en la Mecánica Clásica mediante un espacio puntual euclídeo.
Análogamente, la Mecánica Clásica admite la existencia de un tiempo absoluto que transcurre del mismo modo en todas las regiones del Universo y que es independiente de la existencia de los objetos materiales y de la ocurrencia de los fenómenos físicos.
El móvil más simple que se puede considerar es el punto material o partícula; cuando en la Cinemática se estudia este caso particular de móvil, se denomina "Cinemática de la partícula"; y cuando el móvil bajo estudio es un cuerpo rígido, se lo puede considerar como un sistema de partículas y hacer extensivos análogos conceptos; en este caso se la denomina Cinemática del sólido rígido o del cuerpo rígido.
Cinemática clásica. Fundamentos
La Cinemática trata del estudio del movimiento de los cuerpos en general, y, en particular, el caso simplificado del movimiento de un punto material. Para sistemas de muchas partículas, tales como los fluidos, las leyes de movimiento se estudian en la mecánica de fluidos. El movimiento trazado por una partícula lo mide un observador respecto a un sistema de referencia. Desde el punto de vista matemático, la Cinemática expresa cómo varían las coordenadas de posición de la partícula (o partículas) en función del tiempo. La función que describe la trayectoria recorrida por el cuerpo (o partícula) depende de la velocidad (la rapidez con la que cambia de posición un móvil) y de la aceleración (variación de la velocidad respecto del tiempo).
El movimiento de una partícula (o cuerpo rígido) se puede describir según los valores de velocidad y aceleración, que son magnitudes vectoriales.
- Si la aceleración es nula, da lugar a un movimiento rectilíneo uniforme y la velocidad permanece constante a lo largo del tiempo.
- Si la aceleración es constante con igual dirección que la velocidad, da lugar al movimiento rectilíneo uniformemente acelerado y la velocidad variará a lo largo del tiempo.
- Si la aceleración es constante con dirección perpendicular a la velocidad, da lugar al movimiento circular uniforme, donde el módulo de la velocidad es constante, cambiando su dirección con el tiempo.
- Cuando la aceleración es constante y está en el mismo plano que la velocidad y la trayectoria, tenemos el caso del movimiento parabólico, donde la componente de la velocidad en la dirección de la aceleración se comporta como un movimiento rectilíneo uniformemente acelerado, y la componente perpendicular se comporta como un movimiento rectilíneo uniforme, generándose una trayectoria parabólica al componer ambas.
- Cuando la aceleración es constante pero no está en el mismo plano que la velocidad y la trayectoria, se observa el efecto de Coriolis.
- En el movimiento armónico simple se tiene un movimiento periódico de vaivén, como el del péndulo, en el cual un cuerpo oscila a un lado y a otro desde la posición de equilibrio en una dirección determinada y en intervalos iguales de tiempo. La aceleración y la velocidad son funciones, en este caso, sinusoidales del tiempo.
Al considerar el movimiento de traslación de un cuerpo extenso, en el caso de ser rígido, conociendo como se mueve una de las partículas, se deduce como se mueven las demás. Así basta describir el movimiento de una partícula puntual tal como el centro de masa del cuerpo para especificar el movimiento de todo el cuerpo. En la descripción del movimiento de rotación hay que considerar el eje de rotación respecto del cual rota el cuerpo y la distribución de partículas respecto al eje de giro. El estudio del movimiento de rotación de un sólido rígido suele incluirse en la temática de la mecánica del sólido rígido por ser más complicado. Un movimiento interesante es el de una peonza, que al girar puede tener un movimiento de precesión y de nutación
Cuando un cuerpo posee varios movimientos simultáneamente, tal como uno de traslación y otro de rotación, se puede estudiar cada uno por separado en el sistema de referencia que sea apropiado para cada uno, y luego, superponer los movimientos.
Sistemas de coordenadas
En el estudio del movimiento, los sistemas de coordenadas más útiles se encuentran viendo los límites de la trayectoria a recorrer, o analizando el efecto geométrico de la aceleración que afecta al movimiento. Así, para describir el movimiento de un talón obligado a desplazarse a lo largo de un aro circular, la coordenada más útil sería el ángulo trazado sobre el aro. Del mismo modo, para describir el movimiento de una partícula sometida a la acción de una fuerza central, las coordenadas polares serían las más útiles.
En la gran mayoría de los casos, el estudio cinemático se hace sobre un sistema de coordenadas cartesianas, usando una, dos o tres dimensiones según la trayectoria seguida por el cuerpo.
Registro del movimiento
La tecnología hoy en día nos ofrece muchas formas de registrar el movimiento efectuado por un cuerpo. Así, para medir la velocidad se dispone del radar de tráfico cuyo funcionamiento se basa en el efecto Doppler. El taquímetro es un indicador de la velocidad de un vehículo basado en la frecuencia de rotación de las ruedas. Los caminantes disponen de podómetros que detectan las vibraciones características del paso y, suponiendo una distancia media característica para cada paso, permiten calcular la distancia recorrida. El vídeo, unido al análisis informático de las imágenes, permite igualmente determinar la posición y la velocidad de los vehículos.
Movimiento rectilíneo
Es aquel en el que el móvil describe una trayectoria en línea recta.
Movimiento rectilíneo uniforme
Para este caso la aceleración es cero por lo que la velocidad permanece constante a lo largo del tiempo. Esto corresponde al movimiento de un objeto lanzado en el espacio fuera de toda interacción, o al movimiento de un objeto que se desliza sin fricción. Siendo la velocidad v constante, la posición variará linealmente respecto del tiempo, según la ecuación:


donde
 es la posición inicial del móvil respecto al centro de coordenadas, es decir para
es la posición inicial del móvil respecto al centro de coordenadas, es decir para  .
.Si
 la ecuación anterior corresponde a una recta que pasa por el origen, en una representación gráfica de la función
la ecuación anterior corresponde a una recta que pasa por el origen, en una representación gráfica de la función  , tal como la mostrada en la figura 1.
, tal como la mostrada en la figura 1.Movimiento rectilíneo uniformemente acelerado
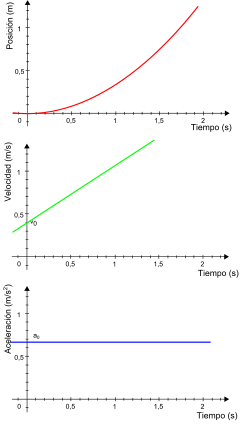 Figura 2. Variación en el tiempo de la posición, la velocidad y la aceleración en un movimiento rectilíneo uniformemente acelerado.
Figura 2. Variación en el tiempo de la posición, la velocidad y la aceleración en un movimiento rectilíneo uniformemente acelerado.
En éste movimiento la aceleración es constante, por lo que la velocidad de móvil varía linealmente y la posición cuadráticamente con tiempo. Las ecuaciones que rigen este movimiento son las siguientes:




Donde
es la posición inicial del móvil,  es la posición final y
es la posición final y  su velocidad inicial, aquella que tiene para .
su velocidad inicial, aquella que tiene para .Obsérvese que si la aceleración fuese nula, las ecuaciones anteriores corresponderían a las de un movimiento rectilíneo uniforme, es decir, con velocidad
 constante.
constante.Dos casos específicos de MRUA son la caída libre y el tiro vertical. La caída libre es el movimiento de un objeto que cae en dirección al centro de la Tierra con una aceleración equivalente a la aceleración de la gravedad (que en el caso del planeta Tierra al nivel del mar es de aproximadamente 9,8 m/s2). El tiro vertical, en cambio, corresponde al de un objeto arrojado en la dirección opuesta al centro de la tierra, ganando altura. En este caso la aceleración de la gravedad, provoca que el objeto vaya perdiendo velocidad, en lugar de ganarla, hasta llegar al estado de reposo; seguidamente, y a partir de allí, comienza un movimiento de caída libre con velocidad inicial nula.
Movimiento armónico simple
 Una masa colgada de un muelle se mueve con un movimiento armónico simple.
Una masa colgada de un muelle se mueve con un movimiento armónico simple.Es un movimiento periódico de vaivén, en el que un cuerpo oscila a un lado y a otro de una posición de equilibrio en una dirección determinada y en intervalos iguales de tiempo. Matemáticamente, la trayectoria recorrida se expresa en función del tiempo usando funciones trigonométricas, que son periódicas. Así por ejemplo, la ecuación de posición respecto del tiempo, para el caso de movimiento en una dimensión es:

ó

la que corresponde a una función sinusoidal de frecuencia
 , de amplitud A y fase de inicial
, de amplitud A y fase de inicial  .
.Los movimientos del péndulo, de una masa unida a un muelle o la vibración de los átomos en las redes cristalinas son de estas características.
La aceleración que experimenta el cuerpo es proporcional al desplazamiento del objeto y de sentido contrario, desde el punto de equilibrio. Matemáticamente:

donde
 es una constante positiva y
es una constante positiva y  se refiere a la elongación (desplazamiento del cuerpo desde la posición de equilibrio).
se refiere a la elongación (desplazamiento del cuerpo desde la posición de equilibrio).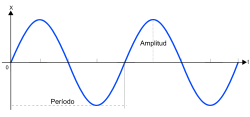 Figura 3. Variación de la posición respecto del tiempo para el movimiento oscilatorio armónico.
Figura 3. Variación de la posición respecto del tiempo para el movimiento oscilatorio armónico.La solución a esa ecuación diferencial lleva a funciones trigonométricas de la forma anterior. Lógicamente, un movimiento periódico oscilatorio real se ralentiza en el tiempo (por fricción mayormente), por lo que la expresión de la aceleración es más complicada, necesitando agregar nuevos términos relacionados con la fricción. Una buena aproximación a la realidad es el estudio del movimiento oscilatorio amortiguado.
Véase también: Oscilador armónicoMovimiento parabólico
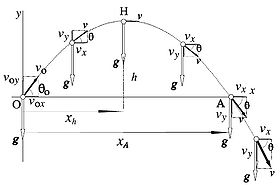 Figura 4. Esquema de la trayectoria del movimiento balístico.
Figura 4. Esquema de la trayectoria del movimiento balístico. Objeto disparado con un ángulo inicial
Objeto disparado con un ángulo inicial desde un punto
desde un punto  que sigue una trayectoria parabólica.
que sigue una trayectoria parabólica.El movimiento parabólico se puede analizar como la composición de dos movimientos rectilíneos distintos: uno horizontal (según el eje x) de velocidad constante y otro vertical (según eje y) uniformemente acelerado, con la aceleración gravitatoria; la composición de ambos da como resultado una trayectoria parabólica.
Claramente, la componente horizontal de la velocidad permanece invariable, pero la componente vertical y el ángulo θ cambian en el transcurso del movimiento.
En la figura 4 se observa que el vector velocidad inicial
forma un ángulo inicial respecto al eje x; y, como se dijo, para el análisis se descompone en los dos tipos de movimiento mencionados; bajo este análisis, las componentes según x e y de la velocidad inicial serán:

El desplazamiento horizontal está dado por la ley del movimiento uniforme, por tanto sus ecuaciones serán (si se considera
):


En tanto que el movimiento según el eje
 será rectilíneo uniformemente acelerado, siendo sus ecuaciones:
será rectilíneo uniformemente acelerado, siendo sus ecuaciones:


Si se reemplaza y opera para eliminar el tiempo, con las ecuaciones que dan las posiciones
 e , se obtiene la ecuación de la trayectoria en el plano xy:
e , se obtiene la ecuación de la trayectoria en el plano xy:
que tiene la forma general

y representa una parábola en el plano y(x). En la figura 4 se muestra esta representación, pero en ella se ha considerado
 (no así en la animación respectiva). En esa figura también se observa que la altura máxima en la trayectoria parabólica se producirá en H, cuando la componente vertical de la velocidad
(no así en la animación respectiva). En esa figura también se observa que la altura máxima en la trayectoria parabólica se producirá en H, cuando la componente vertical de la velocidad  sea nula (máximo de la parábola); y que el alcance horizontal ocurrirá cuando el cuerpo retorne al suelo, en
sea nula (máximo de la parábola); y que el alcance horizontal ocurrirá cuando el cuerpo retorne al suelo, en  (donde la parábola corta al eje ).
(donde la parábola corta al eje ).Movimiento circular
El movimiento circular en la práctica es un tipo muy común de movimiento: Lo experimentan, por ejemplo, las partículas de un disco que gira sobre su eje, las de una noria, las de las agujas de un reloj, las de las paletas de un ventilador, etc. Para el caso de un disco en rotación alrededor de un eje fijo, cualquiera de sus puntos describe trayectorias circulares, realizando un cierto número de vueltas durante determinado intervalo de tiempo. Para la descripción de este movimiento resulta conveniente referirse ángulos recorridos; ya que estos últimos son idénticos para todos los puntos del disco (referido a un mismo centro). La longitud del arco recorrido por un punto del disco depende de su posición y es igual al producto del ángulo recorrido por su distancia al eje o centro de giro. La velocidad angular (ω) se define como el desplazamiento angular respecto del tiempo, y se representa mediante un vector perpendicular al plano de rotación; su sentido se determina aplicando la "regla de la mano derecha" o del sacacorchos. La aceleración angular (α) resulta ser variación de velocidad angular respecto del tiempo, y se representa por un vector análogo al de la velocidad angular, pero puede o no tener el mismo sentido (según acelere o retarde).
La velocidad (v) de una partícula es una magnitud vectorial cuyo módulo expresa la longitud del arco recorrido (espacio) por unidad de tiempo tiempo; dicho módulo también se denomina rapidez o celeridad. Se representa mediante un vector cuya dirección es tangente a la trayectoria circular y su sentido coincide con el del movimiento.
La aceleración (a) de una partícula es una magnitud vectorial que indica la rapidez con que cambia la velocidad respecto del tiempo; esto es, el cambio del vector velocidad por unidad de tiempo. La aceleración tiene generalmente dos componentes: la aceleración tangencial a la trayectoria y la aceleración normal a ésta. La aceleración tangencial es la que causa la variación del módulo de la velocidad (celeridad) respecto del tiempo, mientras que la aceleración normal es la responsable del cambio de dirección de la velocidad. Los módulos de ambas componentes de la aceleración dependen de la la distancia a la que se encuentre la partícula respecto del eje de giro.
Movimiento circular uniforme
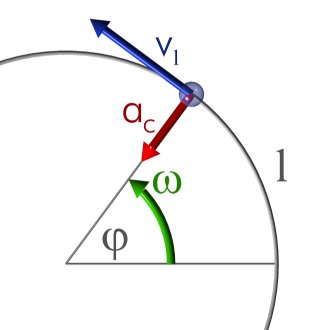
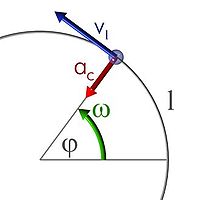 Figura 5. Dirección de magnitudes físicas en una trayectoria circular de radio 1.
Figura 5. Dirección de magnitudes físicas en una trayectoria circular de radio 1.Se caracteriza por tener una velocidad angular constante por lo que la aceleración angular es nula. La velocidad lineal de la partícula no varía en módulo, pero sí en dirección. La aceleración tangencial es nula; pero existe aceleración centrípeta (la aceleración normal), que es causante del cambio de dirección.
Matemáticamente, la velocidad angular se expresa como:


donde
 es la velocidad angular (constante),
es la velocidad angular (constante),  es la variación del ángulo barrido por la partícula y
es la variación del ángulo barrido por la partícula y  es la variación del tiempo.
es la variación del tiempo.El ángulo recorrido en un intervalo de tiempo es:

Movimiento circular uniformemente acelerado
En este movimiento, la velocidad angular varía linealmente respecto del tiempo, por estar sometido el móvil a una aceleración angular constante. Las ecuaciones de movimiento son análogas a las del rectilíneo uniformemente acelerado, pero usando ángulos en vez de distancias:



siendo
 la aceleración angular constante.
la aceleración angular constante.Formulación matemática con el cálculo diferencial
La velocidad es la derivada temporal del vector de posición y la aceleración es la derivada temporal de la velocidad:
o bien sus expresiones integrales:
Véase también: Cálculo diferencialMovimiento sobre la Tierra
Al observar el movimiento sobre la Tierra de cuerpos tales como masas de aire en meteorología o de proyectiles, se encuentran unas desviaciones provocadas por el llamado Efecto Coriolis. Ellas son usadas para probar que la Tierra está rotando sobre su eje. Desde el punto de vista cinemático es interesante explicar lo que ocurre al considerar la trayectoria observada desde un sistema de referencia que está en rotación, la Tierra.
Supongamos que un cañón situado en el ecuador lanza un proyectil hacia el norte a lo largo de un meridiano. Un observador situado al norte sobre el meridiano observa que el proyectil cae al este de lo predicho, desviándose a la derecha de la trayectoria. De forma análoga, si el proyectil se hubiera disparado a lo largo del meridiano hacia el sur, el proyectil también se habría desviado hacia el este, en este caso hacia la izquierda de la trayectoria seguida. La explicación de esta "desviación", provocada por el Efecto Coriolis, es debida a la rotación de la Tierra. El proyectil tiene una velocidad con tres componentes: las dos que afectan al tiro parabólico, hacia el norte (o el sur) y hacia arriba, respectivamente, más una tercera componente perpendicular a las anteriores debida a que el proyectil, antes de salir del cañón, tiene una velocidad igual a la velocidad de rotación de la Tierra en el ecuador. Esta última componente de velocidad es la causante de la desviación observada pues si bien la velocidad angular de rotación de la Tierra es constante sobre toda su superficie, no lo es la velocidad lineal de rotación, la cual es máxima en el ecuador y nula en el centro de los polos. Así, el proyectil conforme avanza hacia el norte (o el sur), se mueve más rápido hacia el este que la superficie de la Tierra, por lo que se observa la desviación mencionada. Lógicamente, si la Tierra no estuviese rotando sobre sí misma, no se daría esta desviación.
Otro caso interesante de movimiento sobre la Tierra es el del péndulo de Foucault. El plano de oscilación del péndulo no permanece fijo, sino que lo observamos girar, girando en sentido horario en el hemisferio norte y en sentido antihorario en el hemisferio sur. Si el péndulo se pone a oscilar en el ecuador, el plano de oscilación no cambia. En cambio, en los polos, el giro del plano de oscilación toma un día. Para latitudes intermedias toma valores mayores, dependiendo de la latitud. La explicación de tal giro se basa en los mismos principios hechos anteriormente para el proyectil de artillería.
Cinemática Relativista
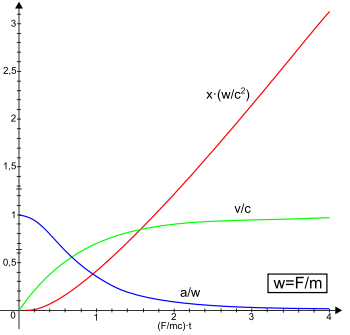 Movimiento relativista bajo fuerza constante: aceleración (azul), velocidad (verde) y desplazamiento (rojo).
Movimiento relativista bajo fuerza constante: aceleración (azul), velocidad (verde) y desplazamiento (rojo).En relatividad, lo que es absoluto es la velocidad de la luz en el vacío, no el espacio o el tiempo. Todo observador en un sistema de referencia inercial, no importa su velocidad relativa, va a medir la misma velocidad para la luz que otro observador en otro sistema. Esto no es posible desde el punto de vista clásico. Las transformaciones de movimiento entre dos sistemas de referencia deben tener en cuenta este hecho, de lo que surgieron las transformaciones de Lorentz. En ellas se ve que las dimensiones espaciales y el tiempo están relacionadas, por lo que en relatividad es normal hablar del espacio-tiempo y de un espacio cuatridimensional.
Hay muchas evidencias experimentales de los efectos relativistas. Por ejemplo, el tiempo medido en un laboratorio para la desintegración de una partícula que ha sido generada con una velocidad próxima a la de la luz es superior al de desintegración medido cuando la partícula se genera en reposo respecto al laboratorio. Esto se explica por la dilatación temporal relativista que ocurre en el primer caso.
La Cinemática es un caso especial de geometría diferencial de curvas, en el que todas las curvas se parametrizan de la misma forma: con el tiempo. Para el caso relativista, el tiempo coordenado es una medida relativa para cada observador, por tanto se requiere el uso de algún tipo de medida invariante como el intervalo relativista o equivalentemente para partículas con masa el tiempo propio. La relación entre el tiempo coordenado de un observador y el tiempo propio viene dado por el factor de Lorentz.[3]
Véase también
- Dinámica
- Dinámica de sistemas
- Mecánica
- Teoría de la Relatividad Especial
- Cinemática del sólido rígido
Referencias
- ↑ J J O'Connor and E F Robertson(University of St Andrews, Scotland). «Galileo biography» (en inglés). Consultado el 12/02/2008.
- ↑ Varignon, Pierre (1700). "Du mouvement en générale par toutes sortes de courbes; & des forces centrales, tant centrifuges que centripètes, nécessaires aux corps qui les décrivent". pp. 83-101. ISBN.
- ↑ Juan José Gómez Cardenas (2006). «Cinemática relativista». Consultado el 12/02/2008.
Bibliografía
- Marcelo Alonso, Edward J. Finn (1976). Física. Fondo Educativo Interamericano. ISBN 84-03-20234-2.
- Richard Feynman (1974) (en inglés). Feynman lectures on Physics Volume 2. Addison Wesley Longman. ISBN 0-201-02115-3.
- Robert Resnick, David Halliday (2004) (en Español). Física 4ta. Edición Vol. 1. CECSA, México. ISBN 970-24-0257-3.
Enlaces externos
 Wikiversidad alberga proyectos de aprendizaje sobre Cinemática.Wikiversidad
Wikiversidad alberga proyectos de aprendizaje sobre Cinemática.Wikiversidad
 Wikilibros alberga un libro o manual sobre Cinemática.
Wikilibros alberga un libro o manual sobre Cinemática. Wikimedia Commons alberga contenido multimedia sobre Cinemática. Commons
Wikimedia Commons alberga contenido multimedia sobre Cinemática. Commons Wikcionario tiene definiciones para Cinemática.Wikcionario
Wikcionario tiene definiciones para Cinemática.Wikcionario- Física por ordenador









Wikimedia foundation. 2010.