- Cuaternión
-
Cuaternión
Los cuaterniones son una extensión de los números reales, similar a la de los números complejos. Mientras que los números complejos son una extensión de los reales por la adición de la unidad imaginaria i, tal que i2 = − 1, los cuaterniones son una extensión generada de manera análoga añadiendo las unidades imaginarias: i, j y k a los números reales y tal que i2 = j2 = k2 = ijk = − 1. Esto se puede resumir en esta tabla de multiplicación: la Tabla de Cayley (inglés).
1 i j k 1 1 i j k i i -1 k -j j j -k -1 i k k j -i -1 1, i, j, k, son entonces las "bases" de las componentes de un cuaternión.
Contenido
Representaciones de los cuaterniones
Vectorial
Un cuaternión puede expresarse como el conjunto:

Entonces un cuaternión es un número de la forma a + bi + cj + dk, donde a, b, c, y d son números reales unívocamente determinados por cada cuaternión.
Análogamente, un cuaternión puede expresarse como el producto interno (componente a componente) de dos vectores, de los cuales uno es el de las componentes
 , y el otro el de las "bases":
, y el otro el de las "bases":  . En este caso, el elemento a1 que forma la componente real se anota aparte, y para el producto interno se consideran solamente las tres bases i, j, k:
. En este caso, el elemento a1 que forma la componente real se anota aparte, y para el producto interno se consideran solamente las tres bases i, j, k:
Esta representación tiene algunas ventajas que pueden ser vistas en algunas operaciones como el producto de cuaterniones.
Matricial
Además hay, al menos, dos maneras de (dos isomorfismos para) representar cuaterniones con matrices. Así el cuaternión
 se puede representar:
se puede representar:- Usando matrices complejas de 2x2:
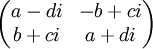
- Donde el conjunto de todas las matrices anteriores se designa mediante U(2). Cuyo subconjunto SU(2) -los cuatenios unitarios- juegan un papel importante en la teoría de gauge y de donde es fácil ver que el determinante es igual a
 . Una propiedad interesante de esta representación es que todos los números complejos son matrices que sólo tienen componentes reales.
. Una propiedad interesante de esta representación es que todos los números complejos son matrices que sólo tienen componentes reales.
- Usando matrices reales de 4x4:
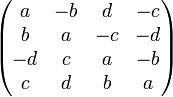
- También en este caso el determinante de la matriz resulta igual a
Aritmética básica de cuaterniones
Definimos la suma y producto entre cuaternios mediante la aritmética usual de las matrices y de los números complejos. Puede comprobarse que el conjunto
 , junto con estas operaciones, satisface todas las propiedades de un campo con excepción de que -el producto- no es conmutativo.
, junto con estas operaciones, satisface todas las propiedades de un campo con excepción de que -el producto- no es conmutativo.a = a1 + a2i + a3j + a4k
b = b1 + b2i + b3j + b4kAdición
La adición se realiza análogamente a como se hace con los complejos, es decir: término a término:

Producto
El producto se realiza componente a componente, y está dado en su forma completa por:

Una forma ligeramente más reducida puede ser:


El producto entre cuaterniones es asociativo y no es conmutativo.
Conjugación
- El conjugado de un cuaternión x = x1 + x2i + x3j + x4k está dado por
 . En otras palabras, el conjugado invierte el signo de los componentes "agregados" del cuaternión. Matricialmente esto corresponderá a la operación de transposición de cualquiera de sus representaciones matriciales.
. En otras palabras, el conjugado invierte el signo de los componentes "agregados" del cuaternión. Matricialmente esto corresponderá a la operación de transposición de cualquiera de sus representaciones matriciales.
- La medida o valor absoluto de un cuaternión x está dado por:
 Matricialmente, esta medida coincide con la raíz cuadrada del determinante de la matiz que representa al cuaternión. Esta medida cumple una propiedad similar al módulo de un número complejo: |zw| = |w| |z| para cualesquiera cuaterniones z y w.
Matricialmente, esta medida coincide con la raíz cuadrada del determinante de la matiz que representa al cuaternión. Esta medida cumple una propiedad similar al módulo de un número complejo: |zw| = |w| |z| para cualesquiera cuaterniones z y w.Usando como norma el valor absoluto, los cuateriones conforman un álgebra de Banach real.
Cociente
Usando la forma del inverso, es posible escribir el cociente de dos cuaterniones como:

El inverso multiplicativo de un cuaternión x, distinto de cero, está dado por:
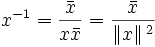 . El cual es mismo patrón que cumplen los números complejos.
. El cual es mismo patrón que cumplen los números complejos.Exponenciación
La exponenciación de números cuaterniónicos, al igual que sucede con los números complejos, está relacionada con funciones trigonométricas. Dado un cuaternión escrito en forma canónica q = a + bi + cj + dk su exponenciación resulta ser:

Comparación con matrices
La multiplicación de matrices no es, en general, conmutativa al igual que en el caso de los cuaterniones. Sin embargo, tampoco todas las matrices poseen un inverso multiplicativo mientras que todos los cuaternios diferentes del cero si son invertibles.
Detalles algebraicos
Los cuaterniones son un ejemplo de cuerpo asimétrico (a veces llamado anillo con división), una estructura algebraica parecida a un cuerpo pero no conmutativo en la multiplicación, es decir: satisfacen todas las propiedades de un cuerpo con excepción de que el producto no es conmutativo. La multiplicación es asociativa y todo cuaternión no nulo posee un único inverso. Forman una
 -álgebra asociativa 4-dimensional sobre los reales y los complejos forman un subconjunto de ella, los cuaterniones no forman un álgebra asociativa sobre los complejos.
-álgebra asociativa 4-dimensional sobre los reales y los complejos forman un subconjunto de ella, los cuaterniones no forman un álgebra asociativa sobre los complejos.Usando la función distancia definida como d(z,w) = |z - w|, los cuaterniones forman un espacio métrico y todas las operaciones aritméticas son continuas.
El conjunto de los cuaterniones de valor absoluto 1 forman una esfera 3-dimensional S³ y un grupo (incluso grupo de Lie) con la multiplicación. Este grupo actúa, mediante conjugación, sobre la copia de R³ constituida por los cuaterniones cuya parte real es cero. No es difícil comprobar que la conjugación por un cuaternión unidad de parte real cos t es una rotación de ángulo 2t con el eje de giro en la dirección de la parte imaginaria.
Así, S³ constituye un recubrimiento doble del grupo SO(3) de matrices ortogonales 3x3 de determinante 1; es isomorfo a SU(2), el grupo de matrices 2x2 complejas unitarias y de determinante unidad.
Sea A el conjunto de cuaterniones de la forma a + bi + cj + dk donde a, b, c y d son, o todos enteros o todos racionales con numerador impar y denominador 2. El conjunto A es un anillo y un retículo. Hay 24 cuaterniones unitarios en este anillo y son los vértices de un politopo regular, llamado {3,4,3} en la notación de Schlafli.
Clasificación en el álgebra abstracta
Un conjunto que posee todas las propiedades de un campo excepto por M2 se conoce como un anillo con división o un campo asimétrico. La construcción de los cuaternios por Hamilton fue el primer ejemplo de este tipo de estructura. La existencia del inverso multiplicativo de un cuaternion no nulo puede comprobarse de manera semejante a como se realiza para los complejos como sigue. Recordemos que para cualquier número complejo z = a + bi se define su norma como y su conjugado como z = a - bi. Tenemos entonces que recordemos que el cuaternio h = a + bI + cJ + dK puede pensarse como la matriz compleja.
Aplicaciones
Los cuaterniones no son únicamente una curiosidad algebraica. Tienen diversas aplicaciones que van desde la teoría de números, en donde pueden utilizarse para probar resultados como el teorema dado por Lagrange que dice que todo número natural n puede expresarse como la suma de cuatro cuadrados perfectos, hasta aplicaciones físicas dentro del electromagnetismo, teoría de la relatividad y mecánica cuántica, entre otras.
Los cuaterniones en física representan rotaciones en el espacio, véase cuaterniones y rotación en el espacio. Además tienen aplicaciones en el electromagnetismo y la mecánica cuántica.
Los cuaterniones se utilizan a menudo en gráficos por computadora (y en el análisis geométrico asociado) para representar la orientación de un objeto en un espacio tridimensional. Las ventajas son: conforman una representación no singular (comparada con, por ejemplo, los ángulos de Euler), más compacta y más rápida que las matrices.
Historia
Los cuaterniones fueron creados por William Rowan Hamilton en 1843. Hamilton buscaba formas de extender los números complejos (que pueden interpretarse como puntos en un plano) a un número mayor de dimensiones. No pudo hacerlo para 3 dimensiones, pero para 4 dimensiones obtuvo los cuaterniones. Según una historia relatada por el propio Hamilton, la solución al problema que le ocupaba le sobrevino un día que estaba paseando con su esposa, bajo la forma de la ecuación: i² = j² = k² = ijk = -1. Inmediatamente, grabó esta expresión en el lateral del puente de Brougham, que estaba muy cerca del lugar.
Hamilton popularizó los cuaterniones con varios libros, el último de los cuales, Elements of Quaternions (del inglés Elementos de Cuaterniones), tenía 800 páginas y fue publicado poco después de su muerte.
Generalizaciones
Si F es un cuerpo cualquiera y a y b son elementos de F, se puede definir un álgebra asociativa unitaria de cuatro dimensiones sobre F utilizando dos generadores, i y j, y las relaciones i² = a, j² = b e ij = -ji. Estas álgebras, o son isomorfas al álgebra de matrices 2x2 sobre F, o son álgebras de división sobre F, y se denominan álgebras de cuaterniones.
Véase también
- Construcción de Cayley-Dickson
- Número hipercomplejo
- números complejos
- cuaterniones y rotación en el espacio
- Josiah Willard Gibbs.
Categorías: Álgebra | Números hipercomplejos | Simetría rotacional
Wikimedia foundation. 2010.