- Curva elástica
-
Curva elástica
La curva elástica o elástica es la deformada por flexión del eje longitudinal de una viga recta, la cual se debe a la aplicación de cargas transversales en el plano xy sobre la viga.
Contenido
Ecuación de la elástica
La ecuación de la elástica es la ecuación diferencial que, para una viga de eje recto, permite encontrar la forma concreta de la curva elástica. Concretamente la ecuación de la elástica es una ecuación para el campo de desplazamientos que sufre el eje de la viga desde su forma recta original a la forma curvada o flectada final. Para una viga de material elástico lineal sometido a pequeñas deformaciones la ecuación diferencial de la elástica viene dada por:
(1)
Donde:
 representa la flecha, ordenada (eje y) o desplazamiento vertical, respecto de la posición sin cargas.
representa la flecha, ordenada (eje y) o desplazamiento vertical, respecto de la posición sin cargas.
 la abcisa (eje X) sobre la viga.
la abcisa (eje X) sobre la viga.
 el momento flector sobre la absciza .
el momento flector sobre la absciza .
 el segundo momento de área o momento de inercia de la sección transversal.
el segundo momento de área o momento de inercia de la sección transversal.
 el módulo de elasticidad del material.
el módulo de elasticidad del material.
La ecuación () constituye sólo una aproximación, en la que se ha supuesto que las deformaciones son muy pequeñas con respecto a las dimensiones de la viga y, por tanto, se ha aproximado el giro de una sección de la viga con la derivada primera de la flecha. Para deformaciones mayores se obtiene la ecuación más exacta ():(1')
![\frac {d^2v(x)}{dx^2} = \frac {M_z(x)}{EI_z}\left[ 1+\left(\frac{dv(x)}{dx}\right)^2\right]^\frac{3}{2}](/pictures/eswiki/99/c378f61475369c0c375358801b1e8259.png)
La ecuación de la elástica () puede ser reescrita en función de la carga distribuida q(x) sobre la viga:
(2)
Esta última ecuación es interesante porque su generalización a elementos bidimensionales es precisamente la ecuación fundamental de gobierno de placas o ecuación de Lagrange para placas delgadas:
![\left(\frac{\partial^2}{\partial x^2}+\frac{\partial^2}{\partial y^2}\right)
\left[ EI_{pl} \left( \frac{\partial^2w(x,y)}{\partial x^2}+
\frac{\partial^2w(x,y)}{\partial y^2}\right) \right] = q(x,y)](/pictures/eswiki/97/a764b0ea99409211d5bfcd68e16b94f4.png)
Donde D = EIpl es la rigidez de una placa delgada en flexión.
Ejemplo
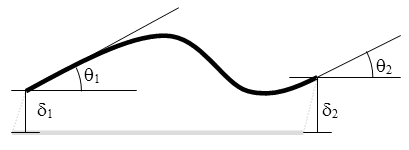
 Viga deformada por flexión
Viga deformada por flexión
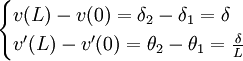
Para una viga elástica en la que se aplican sólo momentos M1 y M2, la forma de la curva elástica depende sólo de dos parámetros independientes, la forma aproximada de la deformada dependerá del valor y signo relativo de estos momentos, siendo un caso típico el mostrado en la figura adyacente. Escribiendo la ley de momentos flectores para los puntos intermedios de la viga y escogiendo las condiciones de contornos llegamos a la ecuación diferencial siguiente:
La solución analítica de ecuación anterior con cualquiera de los dos posibles elecciones de contorno, se obtiene como:
Cálculo de deformaciones en vigas
Método de integración
Este método consiste en la integración de la ecuación descrita en la sección anterior. Es necesario obtener primero la ley de variación del momento flector para la viga estudiada, tal como se hizo en el ejemplo anterior. Una vez conocida la ley de momentos flectores, se procede por integración directa.
Si se conoce para un punto concreto, digamos por ejemplo x = a, el desplazamiento vertical y el ángulo girado por la curva elástica alrededor de ese punto respecto a la posición original el resultado de la deformación el resultado de la integración directa es simplemente[1]

El llamado método del área-momento, es en realidad una versión en términos geométricos del método de integración. De acuerdo con esta versión la doble integral en la ecuación anterior puede calcularse del siguiente modo:
- Se calcula la superficie del área bajo la curva Mz/EI.
- Se calcula la distancia centroide del área anterior medida a partir del eje de la viga.
- La segunda integral buscada es el producto de las dos magnitudes anteriores.
Método de superposición
El método de superposición usa el principio de superposición de la teoría de la elasticidad lineal. El método de superposición consiste en descomponer el problema inicial de cálculo de vigas en problemas o casos más simples, que sumados o "superpuestos" son equivalentes al problema original. Puesto que para los casos más sencillos existen tablas y fórmulas de pendientes y deformaciones en vigas al descomponer el problema original como combinaciones de los casos más simples recogidos en las tablas la solución del problema puede ser calculada sumando resultados de estas tablas y fórmulas.
Referencia
Véase también
Categorías: Resistencia de materiales | Análisis estructural

Wikimedia foundation. 2010.