- Determinante (matemática)
-
En matemáticas se define el determinante como una forma multilineal alternada de un cuerpo. Esta definición indica una serie de propiedades matemáticas y generaliza el concepto de determinante haciéndolo aplicable en numerosos campos. Sin embargo, el concepto de determinante o de volumen orientado fue introducido para estudiar el número de soluciones de los sistemas de ecuaciones lineales.
Contenido
Historia de los determinantes
Los determinantes fueron introducidos en Occidente a partir del siglo XVI, esto es, antes que las matrices, que no aparecieron hasta el siglo XIX. Conviene recordar que los chinos (Hui, Liu. iuzhang Suanshu o Los nueve capítulos del arte matemático.) fueron los primeros en utilizar la tabla de ceros y en aplicar un algoritmo que, desde el Siglo XIX, se conoce con el nombre de Eliminación de Gauss-Jordan.
La historia de los determinantes
Los determinantes hicieron su aparición en las matemáticas más de un siglo antes que las matrices. El término matriz fue creado por James Joseph Sylvester, tratando de dar a entender que era “la madre de los determinantes”.
Algunos de los más grandes matemáticos de los siglos XVIII y XIX contribuyeron al desarrollo de las propiedades de los determinantes. La mayoría de los historiadores coinciden en afirmar que la teoría de los determinantes se originó con el matemático alemán Gottfried Wilhelm Leibniz (1646-1716) quien fue con Newton, el co inventor del cálculo diferencial e integral. Leibniz empleó los determinantes en 1693 con relación a los sistemas de ecuaciones lineales simultáneas. No obstante hay quienes creen que el matemático japonés Seki Kowa hizo lo mismo unos 10 años antes.
Las contribuciones más prolíficas a la teoría de los determinantes fueron las del matemático francés Agustin-Louis Cauchy (1789-1857). Cauchy escribió, en 1812 una memoria de 84 páginas que contenía la primera demostración del teorema detAB=detA detB. En 1840 Cauchy hizo muchas otras contribuciones a las matemáticas. En su texto de cálculo de 1829 Lecons sur le calcul différential, dio la primera definición razonablemente clara de límite.
Cauchy escribió ampliamente tanto en las matemáticas puras como en las aplicadas. Solo Euler escribió más. Cauchy hizo contribuciones en varias áreas, incluyendo la teoría de las funciones reales y complejas, la teoría de la probabilidad, geometría, teoría de propagación de las ondas y las series infinitas.
A Cauchy se le reconoce el haber establecido nuevos niveles de rigor en las publicaciones matemáticas. Después de Cauchy, fue mucho más difícil publicar escritos basándose en la intuición; se exigió una estricta adhesión a las demostraciones rigurosas.
El volumen de las publicaciones de Cauchy fue abrumador . Cuando la Academis Francesa de Ciencias comenzó a publicar su revista Comptes Rendus en 1835, Cauchy envió su obra para que se publicara, en poco tiempo los gastos de impresión se hicieron tan grandes, solo por la obra de Cauchy, que la academia impuso un límite de cuatro cuartillas por cada documento a ser publicado.
Hay algunos otros matemáticos que merecen ser mencionados aquí. El desarrollo de un determinante por cofactores fue empleado por primera vez por el matemático francés Pierre de Laplace (1749-1827). Laplace es mejor conocido por la transformación que lleva su nombre que se estudia en los cursos de matemáticas aplicadas.
Un contribuyente principal de la teoría de los determinantes (estando solo Cauchy antes que él) fue el matemático alemán Carl Gustav Jacobi (1804-1851). Fue con él con quien la palabra “determinante” ganó la aceptación definitiva. Lo primero en lo que Jacobi empleó los determinantes fue en las funciones, al establecer la teoría de las funciones de varias variables. Sylvester llamó más tarde jacobiano a éste determinante.
Primeros cálculos de determinantes
En su sentido original, el determinante determina la unicidad de la solución de un sistema de ecuaciones lineales. Fue introducido para el caso de orden 2 por Cardano en 1545 en su obra Ars Magna presentado como una regla para la resolución de sistemas de dos ecuaciones con dos incógnitas. Esta primera fórmula lleva el nombre de regula de modo.
 El japonés Kowa Seki introdujo los determinantes de orden 3 y 4 en la misma época que el alemán Leibniz.
El japonés Kowa Seki introdujo los determinantes de orden 3 y 4 en la misma época que el alemán Leibniz.
La aparición de determinantes de órdenes superiores tardó aún más de cien años en llegar. Curiosamente el japonés Kowa Seki y el alemán Leibniz otorgaron los primeros ejemplos casi simultáneamente.
Leibniz estudió los distintos tipos de sistemas de ecuaciones lineales. Al no disponer de la notación matricial, representaba los coeficientes de las incógnitas con una pareja de índices: así pues escribía ij para representar ai, j. En 1678 se interesó por un sistema de tres ecuaciones con tres incógnitas y obtuvo, para dicho ejemplo, la fórmula de desarrollo a lo largo de una columna. El mismo año, escribió un determinante de orden 4, correcto en todo salvo en el signo.[1] Leibniz no publicó este trabajo, que pareció quedar olvidado hasta que los resultados fueron redescubiertos de forma independiente cincuenta años más tarde.
En el mismo periodo, Kowa Seki publicó un manuscrito sobre los determinantes, donde se hallan fórmulas generales difíciles de interpretar. Parece que se dan fórmulas correctas para determinantes de tamaño 3 y 4, y de nuevo los signos mal para los determinantes de tamaño superior.[2] El descubrimiento se queda sin futuro a causa del cierre de Japón al mundo exterior por órdenes del shōgun, lo que se ve reflejado en la expulsión de los Jesuitas en 1638.
Determinantes de cualquier dimensión
En 1748, en un tratado póstumo de álgebra de MacLaurin aparece la regla para obtener la solución de un sistema de n ecuaciones lineales con n incógnitas cuando n es 2, 3 o 4 mediante el uso de determinantes.[3] [4] En 1750, Cramer da la regla para el caso general, aunque no ofrece demostración alguna. Los métodos de cálculo de los determinantes son hasta entonces delicados debido a que se basan en la noción de signatura de una permutación.[5]
Los matemáticos se familiarizan con este nuevo objeto a través de los artículos de Bézout en 1764, de Vandermonde en 1771 (que proporciona concretamente el cálculo del determinante de la actual Matriz de Vandermonde). En 1772, Laplace establece las reglas de recurrencia que llevan su nombre. En el año siguiente, Lagrange descubre la relación entre el cálculo de los determinantes y el de los volúmenes.[4]
Gauss utiliza por primera vez el término « déterminante », en las Disquisitiones arithmeticae en 1801. Lo empleaba para lo que hoy día denominamos discriminante de una cuádrica y que es un caso particular de determinante moderno. Igualmente estuvo cerca de obtener el teorema del determinante de un producto.
Aparición de la noción moderna de determinante
Cauchy fue el primero en emplear el término determinante con su significado moderno. Se encargó de realizar una síntesis de los conocimientos anteriores y publicó en 1812 la fórmula y demostración del determinante de un producto junto con el enunciado y demostración de la regla de Laplace.[6] Ese mismo año Binet ofreció otra demostración (incorrecta) para la fórmula del determinante de un producto.[6] [4] Paralelamente Cauchy establece las bases del estudio de la reducción de endomorfismos.
En 1825 Heinrich F. Scherk publicó nuevas propiedades de los determinantes.[6] Entre las propiedades halladas estaba la propiedad de que en una matriz en la que una fila es combinación lineal de varias de las demás filas de la matriz el determinante es cero.
Con la publicación de sus tres tratados sobre determinantes en 1841 en la revista Crelle, Jacobi aporta a la noción una gran notoriedad. Por primera vez presenta métodos sistemáticos de cálculo bajo una forma algorítmica. Del mismo modo, hace posible la evaluación del determinante de funciones con instauración del jacobiano, lo que supone un gran avance en la abstracción del concepto del determinante.
El cuadro matricial es introducido por los trabajos de Cayley y James Joseph Sylvester[cita requerida]. Cayley es también el inventor de la notación de los determinantes mediante barras verticales (1841[6] ) y establece la fórmula para el cálculo de la inversa de una matriz mediante determinantes(1858[4] ).
La teoría se ve reforzada por el estudio de determinantes que tienen propiedades de simetría particulares y por la introducción del determinante en nuevos campos de las matemáticas, como el wronskiano en el caso de las ecuaciones diferenciales lineales.
Métodos de cálculo
Para el cálculo de determinantes de matrices de cualquier orden, existe una regla recursiva (teorema de Laplace) que reduce el cálculo a sumas y restas de varios determinantes de un orden inferior. Este proceso se puede repetir tantas veces como sea necesario hasta reducir el problema al cálculo de múltiples determinantes de orden tan pequeño como se quiera. Sabiendo que el determinante de un escalar es el propio escalar, es posible calcular el determinante de cualquier matriz aplicando dicho teorema.
Además de esta regla, para calcular determinantes de matrices de cualquier orden podemos usar otra definición de determinante conocida como Fórmula de Leibniz.
La fórmula de Leibniz para el determinante de una matriz cuadrada A de orden n es:
donde la suma se calcula sobre todas las permutaciónes σ del conjunto {1,2,...,n}. La posición del elemento i después de la permutación σ se denota como σi. El conjunto de todas las permutaciones es Pn. Para cada σ, sgn(σ) es la signatura de σ, esto es +1 si la permutación es par y −1 si es impar (ver Paridad de permutaciones).
En cualquiera de los n! sumandos, el término
denota el producto de las entradas en la posición (i, σi), donde i va desde 1 hasta n:
Matrices de orden inferior
El caso de matrices de orden inferior (orden 1, 2 ó 3) es tan sencillo que su determinante se calcula con sencillas reglas conocidas. Dichas reglas son también deducibles del teorema de Laplace.
Una matriz de orden uno, es un caso trivial, pero lo trataremos para completar todos los casos. Una matriz de orden uno puede ser tratada como un escalar, pero aquí la consideraremos una matriz cuadrada de orden uno:
El valor del determinante es igual al único termino de la matriz:
Los determinantes de una matriz de orden 2:
se calculan con la siguiente fórmula:
Dada una matriz de orden 3:
En determinante de orden 3 se calcula mediante la regla de Sarrus:
Determinantes de orden superior
El determinante de orden n, puede desarrollarse a partir de una fila o columna, reduciendo el problema al cálculo de un determinante de orden n-1. Para ello se toma una fila o columna cualquiera, multiplicando cada elemento por su adjunto (es decir, el determinante de la matriz que se obtiene eliminando la fila y columna correspondiente a dicho elemento, multiplicado por (-1)i+j donde i es el número de fila y j el número de columna). La suma de todos los productos es igual al determinante.
En caso de un determinante de orden 4, se obtienen directamente determinantes de orden 3 que podrán ser calculados por la regla de Sarrus. En cambio, en los determinantes de orden superior, como por ejemplo n = 5, al desarrollar los elementos de una línea, obtendremos determinantes de orden 4, que a su vez se deberán desarrollar en por el mismo método, para obtener determinantes de orden 3. Por ejemplo, para obtener con el método especificado un determinante de orden 4, se deben calcular 4 determinantes de orden 3. En cambio, si previamente se logran tres ceros en una fila o columna, bastara con calcular solo un determinante de orden 3 (ya que los demás determinantes estarán multiplicados por 0, lo que los anula).
La cantidad de operaciones aumenta muy rápidamente. En el peor de los casos (sin obtener ceros en filas y columnas), para un determinante de orden 4 se deberán desarrollar 4 determinates de orden 3. En un determinante de orden 5, se obtienen 5 determinates de orden 4 a desarrollar, dándonos 20 determinates de orden 3. El número de determinates de orden 3 que se obtienen en el desarrollo de un determinante de orden n es igual a

Por ejemplo, mediante este método, para un determinante de orden 10 se deberán calcular 10 x 9 x 8 x 7 x 6 x 5 x 4 = 604.800 determinantes de orden 3.
También puede utilizarse el Método de eliminación Gaussiana, para convertir la matriz en una matriz triangular. Si bien el proceso puede parecer tedioso, estará muy lejos de los 14.529.715.200 de determinantes de orden 3 necesarios para calcular el determinante de una matriz de orden 14.
Métodos numéricos
Para reducir el coste computacional de los determinantes a la vez que mejorar su estabilidad frente a errores de redondeo, se aplica la regla de Chio, que permite utilizar métodos de triangularización de la matriz reduciendo con ello el cálculo del determinante al producto de los elementos de la diagonal de la matriz resultante. Para la triangularización se puede utilizar cualquier método conocido que sea numéricamente estable. Éstos suelen basarse en el uso de matrices ortonormales, como ocurre con el método de Gauss o con el uso de reflexiones de Householder o rotaciones de Givens.
La precisión limitada del cálculo numérico produce incertidumbre en ocasiones en los resultados de este método. Un valor muy pequeño del determinante podría ser el resultado de una matriz de rango deficiente, aunque no lo es necesariamente. Por otra parte, para matrices casi singulares el resultado no siempre es preciso. Es necesario comprobar el rango de la matriz con otros métodos o calcular el número de condición de la matriz para determinar la fiabilidad del resultado.
Primeros ejemplos: áreas y volúmenes
El cálculo de áreas y volúmenes bajo forma de determinantes en espacios euclídeos aparecen como casos particulares de una noción más general de determinante. La letra mayúscula D (Det) se reserva a veces para distinguirlos.
Determinante de dos vectores en el plano euclídeo
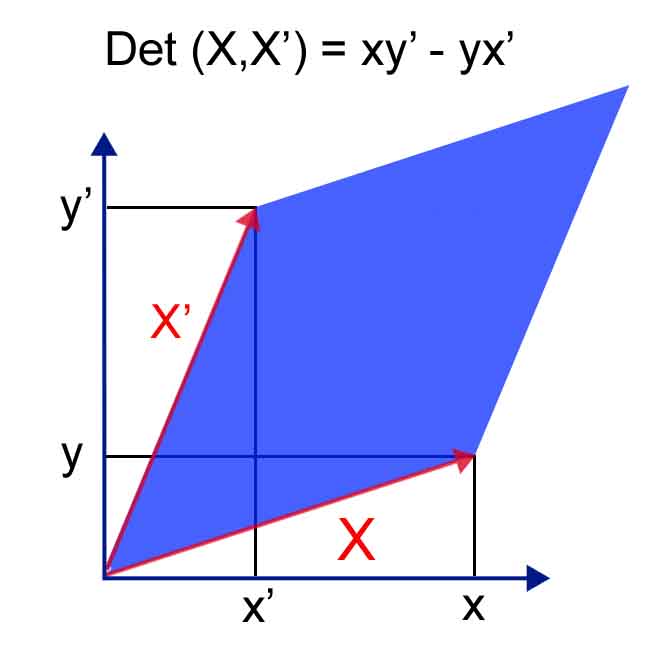
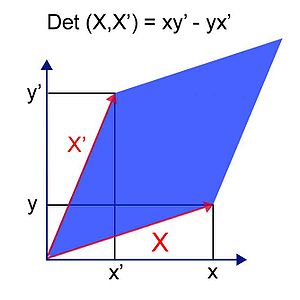 Fig. 1. El determinante es el área azul orientada.
Fig. 1. El determinante es el área azul orientada.Sea P el plano euclídeo. El determinante de los vectores X y X' se obtiene con la expresión analítica
o, de manera equivalente, por la expresión geométrica
en la cual θ es el ángulo orientado formado por los vectores X y X'.
Propiedades
- El valor absoluto del determinante es igual a la superficie del paralelogramo definido por X y X' (Xsin θ es en efecto la altura del paralelogramo, por lo que A = Base × Altura).
- El determinante es nulo si y sólo si los dos vectores son colineales (el paralelogramo se convierte en una línea).
- Su signo es estrictamente positivo si y sólo si la medida del ángulo (X, X ') se encuentra en ]0,π[.
- La aplicación del determinante es bilineal: la linearidad respecto al primer vector se escribe
y respecto al segundo
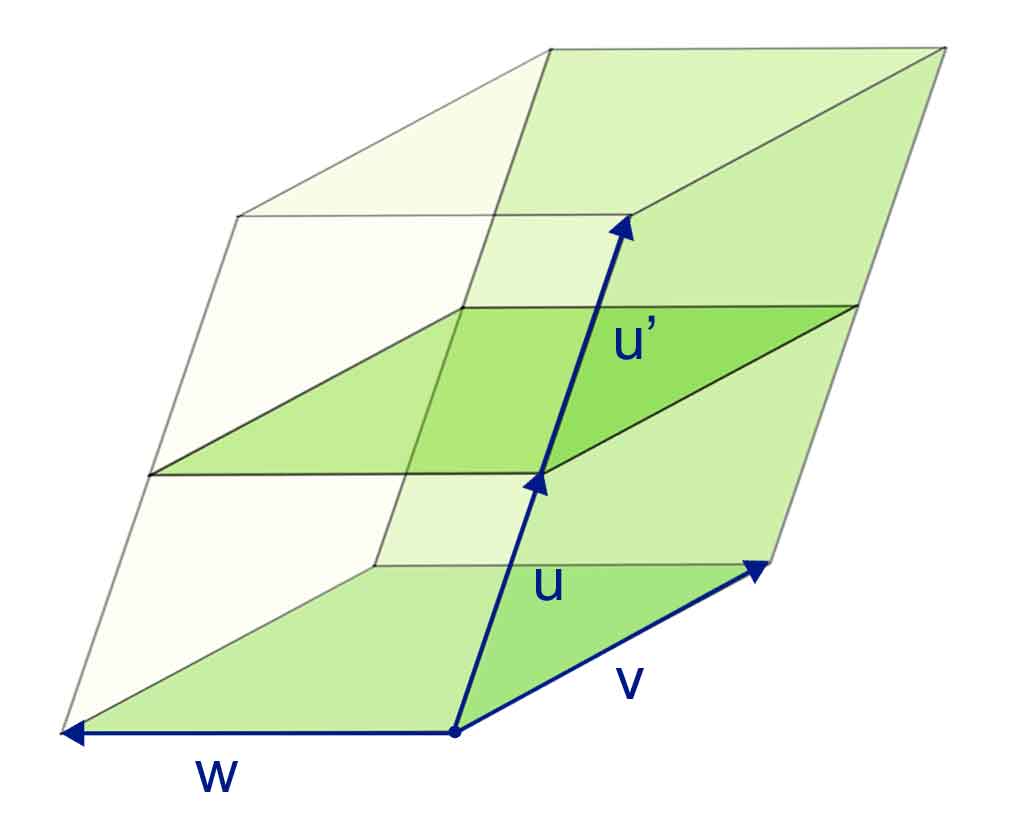
 Fig. 2.Suma de las áreas de dos paralelogramos adyacentes.
Fig. 2.Suma de las áreas de dos paralelogramos adyacentes.La figura 2, en el plano, ilustra un caso particular de esta fórmula. Representa dos paralelogramos adyacentes, uno definido por los vectores u y v (en verde), y otro por los vectores u' y v (en azul). Es fácil ver sobre este ejemplo el área del paralelogramo definido por los vectores u+u' y v (en gris): es igual a la suma de los dos paralelogramos precedentes a la cual se sustrae el área de un triángulo y se añade el área de otro triángulo. Ambos triángulos se corresponden por translación y la fórmula siguiente se verifica Det (u+u', v)=Det (u, v)+Det (u', v).
El dibujo corresponde a un caso particular de la fórmula de bilinealidad ya que las orientaciones han sido elegidas de manera que las áreas tengan el mismo signo, aunque ayuda a comprender el contenido geométrico.
Generalización
Es posible definir la noción de determinante en un plano euclídeo orientado con una base ortonormal directa B utilizando las coordenadas de los vectores en esta base. El cálculo del determinante da el mismo resultado sea cual sea la base ortonormal directa elegida para el cálculo.
Determinante de tres vectores en el espacio euclídeo
Sea E el espacio euclídeo orientado de dimensión 3. El determinante de tres vectores de E se da por
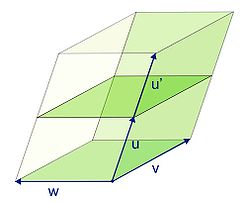 Fig. 3. Ilustración gráfica de la trilinealidad.
Fig. 3. Ilustración gráfica de la trilinealidad.Este determinante lleva el nombre de producto mixto.
Propiedades
- El valor absoluto del determinante es igual al volumen de paralelepípedo definido por los tres vectores.
- El determinante es nulo si y sólo si los tres vectores se encuentran en un mismo plano (paralelepípedo "plano").
- La aplicación determinante es trilineal: sobre todo
Una ilustración geométrica de esta propiedad se da en la figura 3 con dos paralelepípedos adyacentes, es decir con una cara común. La igualdad siguiente es entonces intuitiva:
 .
.
Propiedades
- El determinante de una matriz es un invariante algebraico, lo cual implica que dada una aplicación lineal todas las matrices que la represente tendrán el mismo determinante. Eso permite definir el valor del determinante no sólo para matrices sino también para aplicaciones lineales.
- Una propiedad fundamental del determinante es su comportamiento multiplicativo frente al producto de matrices:

Eso implica en términos de aplicaciones lineales dada la relación existente entre la composición de aplicaciones lineales y el producto de matrices que las representan que, dadas dos aplicaciones linales
 y
y  se tiene la siguiente igualdad:
se tiene la siguiente igualdad:
- El determinante de una matriz y el de su traspuesta coinciden:

- Una aplicación lineal entre espacios vectoriales es invertible si y sólo si su determinante no es nulo. Por lo tanto, una matriz con coeficientes en un cuerpo es invertible si y sólo si su determinante es no nulo.
Matrices en bloques
Sean A,B,C,D matrices
 respectivamente. Entonces
respectivamente. Entonces Esto se puede ver de la formula de Leibiniz Leibniz formula. Empleando la siguiente identidad
Esto se puede ver de la formula de Leibiniz Leibniz formula. Empleando la siguiente identidadvemos que para una matriz general
Análogamente, se puede obtener una identidad similar con det(D) factorizado.[7]
Si dij son matrices diagonales,
Derivada de la función determinante
La función determinante puede definirse sobre el espacio vectorial formado por matrices cuadradas de orden n. Dicho espacio vectorial puede convertirse fácilmente en un espacio vectorial normado mediante la norma matricial, gracias a lo cual dicho espacio se convierte en un espacio métrico y topológico, donde se pueden definir límites e incluso derivadas. El diferencial de la función derivada (o jacobiana) viene en términos de la matriz de adjuntos:

Donde:
 es la matriz de adjuntos.
es la matriz de adjuntos. , es la traza de la matriz.
, es la traza de la matriz.
Menores de una matriz
Además del determinante de una matriz cuadrada, dada una matriz se pueden definir otras magnitudes mediante el empleo de determinantes relacionadas con las propiedades algebraicas de dicha matriz. En concreto dada una matriz cuadrada o rectangular se pueden definir los llamados determinantes menores de orden r a partir del determinante de submatrices cuadradas de rxr de la matriz original. Dada la matriz
![\mathbf{A} = [a_{ij}]](4/bc4259c100c37048880c5d745c454005.png) :
:
Se define cualquier menor de rango r como:

Debe notarse que en general existirá un número elevado de menores de orden r, de hecho el número de menores de orden r de una matriz mxn viene dado por:

Una propiedad interesante es que el rango coincide con el orden del menor no nulo más grande posible, siendo el cálculo de menores una de los medios más empleados para calcular el rango de una matriz o de una aplicación lineal.
Notas
- ↑ E. Knobloch, Der Beginn der Determinantentheorie, Leibnizens nachgelassene Studien zum Determinantenkalkül (Hildesheim, 1980)
- ↑ Y. Mikami, The development of Mathematics in China and Japan (1913, 2e éd. Chelsea Pub. Company 1974)
- ↑ C. B. Boyer, A History of Mathematics (John Wiley, 1968)
- ↑ a b c d O'Connor, John J.; Robertson, Edmund F., «Biografía de Matrices and determinants» (en inglés), MacTutor History of Mathematics archive, Universidad de Saint Andrews, http://www-history.mcs.st-andrews.ac.uk/HistTopics/Matrices_and_determinants.html
- ↑ M. Cantor, Geschichte der Mathematik (Teubner, 1913)
- ↑ a b c d Kline, 1990, p. 796
- ↑ Estas identidades fueron tomadas de http://www.ee.ic.ac.uk/hp/staff/www/matrix/proof003.html
- ↑ Este es un caso especial de un teorema publicado en http://www.mth.kcl.ac.uk/~jrs/gazette/blocks.pdf
Referencias
- Topus 4
- Kline, Morris (1990). Mathematical Thought from Ancient to Modern Times. 2. New York: Oxford University Press. ISBN 0-19-506136-5.
Véase también
Categorías:- Determinantes
- Álgebra lineal




















Wikimedia foundation. 2010.