- Microcontrolador
-
 Microcontrolador Motorola 68HC11 y chips de soporte.
Microcontrolador Motorola 68HC11 y chips de soporte.
Un microcontrolador (abreviado μC,UC o MCU) es un circuito integrado programable, capaz de ejecutar las órdenes grabadas en su memoria. Está compuesto de varios bloques funcionales, los cuales cumplen una tarea específica.Un microcontrolador incluye en su interior las tres unidades funcionales principales de una computadora: unidad central de procesamiento, memoria y periféricos de entrada y salida.
Al ser fabricados, la EEPROM del microcontrolador no posee datos.Para que pueda controlar algún proceso es necesario generar o crear y luego grabar en la EEPROM del microcontrolador algún programa, el cual puede ser escrito en lenguaje asm u otro lenguaje para microcontroladores;Sin embargo, para que el programa pueda ser grabado en la EEPROM del microcontrolador, debe ser codificado en sistema numérico hexadecimal que es finalmente el sistema que hace trabajar al microcontrolador cuando éste es alimentado con el Voltaje adecuado y asociado a dispositivos analógicos y discretos para su funcionamiento.
Características
Son diseñados para reducir el costo económico y el consumo de energía de un sistema en particular. Por eso el tamaño de la unidad central de procesamiento, la cantidad de memoria y los periféricos incluidos dependerán de la aplicación. El control de un electrodoméstico sencillo como una batidora utilizará un procesador muy pequeño (4 u 8 bits) porque sustituirá a un autómata finito. En cambio, un reproductor de música y/o vídeo digital (mp3 o mp4) requerirá de un procesador de 32 bits o de 64 bits y de uno o más Códecs de señal digital (audio y/o vídeo). El control de un sistema de frenos ABS (Antilock Brake System) se basa normalmente en un microcontrolador de 16 bits, al igual que el sistema de control electrónico del motor en un automóvil.
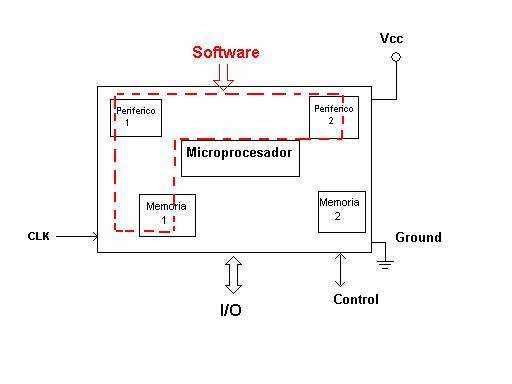
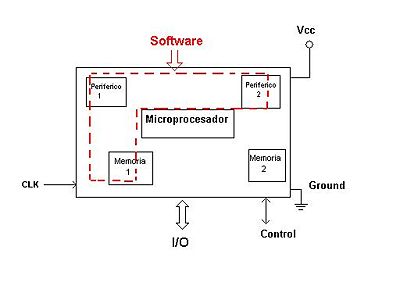 Esquema de un microcontrolador.
Esquema de un microcontrolador.Los microcontroladores representan la inmensa mayoría de los chips de computadoras vendidos, sobre un 50 % son controladores "simples" y el restante corresponde a DSPs más especializados. Mientras se pueden tener uno o dos microprocesadores de propósito general en casa (Ud. está usando uno para esto), usted tiene distribuidos seguramente entre los electrodomésticos de su hogar una o dos docenas de microcontroladores. Pueden encontrarse en casi cualquier dispositivo electrónico como automóviles, lavadoras, hornos microondas, teléfonos, etc.
Un microcontrolador difiere de una unidad central de procesamiento normal, debido a que es más fácil convertirla en una computadora en funcionamiento, con un mínimo de circuitos integrados externos de apoyo. La idea es que el circuito integrado se coloque en el dispositivo, enganchado a la fuente de energía y de información que necesite, y eso es todo. Un microprocesador tradicional no le permitirá hacer esto, ya que espera que todas estas tareas sean manejadas por otros chips. Hay que agregarle los módulos de entrada y salida (puertos) y la memoria para almacenamiento de información.
Por ejemplo, un microcontrolador típico tendrá un generador de reloj integrado y una pequeña cantidad de memoria de acceso aleatorio y/o ROM/EPROM/EEPROM/flash, significando que para hacerlo funcionar, todo lo que se necesita son unos pocos programas de control y un cristal de sincronización. Los microcontroladores disponen generalmente también de una gran variedad de dispositivos de entrada/salida, como convertidores de analógico a digital, temporizadores, UARTs y buses de interfaz serie especializados, como I2C y CAN. Frecuentemente, estos dispositivos integrados pueden ser controlados por instrucciones de procesadores especializados. Los modernos microcontroladores frecuentemente incluyen un lenguaje de programación integrado, como el lenguaje de programación BASIC que se utiliza bastante con este propósito.
Los microcontroladores negocian la velocidad y la flexibilidad para facilitar su uso. Debido a que se utiliza bastante sitio en el chip para incluir funcionalidad, como los dispositivos de entrada/salida o la memoria que incluye el microcontrolador, se ha de prescindir de cualquier otra circuitería.
Estructura básica de un microcontrolador
En esta figura, vemos al microcontrolador metido dentro de un encapsulado de circuito integrado, con su procesador (CPU), buses, memoria, periféricos y puertos de entrada/salida. Fuera del encapsulado se ubican otros circuitos para completar periféricos internos y dispositivos que pueden conectarse a los pines de entrada/salida. También se conectarán a los pines del encapsulado la alimentación, masa, circuito de completamiento del oscilador y otros circuitos necesarios para que el microcontrolador pueda trabajar.
Arquitecturas de computadora
Básicamente existen dos arquitecturas de computadoras, y por supuesto, están presentes en el mundo de los microcontroladores: Von Neumann y Harvard. Ambas se diferencian en la forma de conexión de la memoria al procesador y en los buses que cada una necesita.
La arquitectura Von Neumann es la que se utiliza en las computadoras personales, para ella existe una sola memoria, donde coexisten las instrucciones de programa y los datos, accedidos con un bus de dirección, uno de datos y uno de control.
Debemos comprender que en una PC, cuando se carga un programa en memoria, a éste se le asigna un espacio de direcciones de la memoria que se divide en segmentos, de los cuales típicamente tenderemos los siguientes: código (programa), datos y pila. Es por ello que podemos hablar de la memoria como un todo, aunque existan distintos dispositivos físicos en el sistema (HDD, RAM, CD, FLASH).
En el caso de los microcontroladores, existen dos tipos de memoria bien definidas: memoria de datos (típicamente algún tipo de SRAM) y memoria de programas (ROM, PROM, EEPROM, flash u de otro tipo no volátil). En este caso la organización es distinta a las de las PC, porque hay circuitos distintos para cada memoria y normalmente no se utilizan los registros de segmentos, sino que la memoria está segregada y el acceso a cada tipo de memoria depende de las instrucciones del procesador.
A pesar de que en los sistemas integrados con arquitectura Von Neumann la memoria esté segregada, y existan diferencias con respecto a la definición tradicional de esta arquitectura; los buses para acceder a ambos tipos de memoria son los mismos, del procesador solamente salen el bus de datos, el de direcciones, y el de control. Como conclusión, la arquitectura no ha sido alterada, porque la forma en que se conecta la memoria al procesador sigue el mismo principio definido en la arquitectura básica.
Esta arquitectura es la variante adecuada para las PC, porque permite ahorrar una buena cantidad de líneas de E/S, que son bastante costosas, sobre todo para aquellos sistemas como las PC, donde el procesador se monta en algún tipo de zócalo alojado en una placa madre. También esta organización les ahorra a los diseñadores de motherboards una buena cantidad de problemas y reduce el costo de este tipo de sistemas.
Algunas familias de microcontroladores como la INTEL-51 y la Z80 implementan este tipo de arquitectura, fundamentalmente porque era la utilizada cuando aparecieron los primeros microcontroladores.
La otra variante es la arquitectura Harvard, y por excelencia la utilizada en supercomputadoras, en los microcontroladores, y sistemas integrados en general. En este caso, además de la memoria, el procesador tiene los buses segregados, de modo que cada tipo de memoria tiene un bus de datos, uno de direcciones y uno de control.
La ventaja fundamental de esta arquitectura es que permite adecuar el tamaño de los buses a las características de cada tipo de memoria; además, el procesador puede acceder a cada una de ellas de forma simultánea, lo que se traduce en un aumento significativo de la velocidad de procesamiento, típicamente los sistemas con esta arquitectura pueden ser dos veces más rápidos que sistemas similares con arquitectura Von Neumann.
La desventaja está en que consume muchas líneas de E/S del procesador; por lo que en sistemas donde el procesador está ubicado en su propio encapsulado, solo se utiliza en supercomputadoras. Sin embargo, en los microcontroladores y otros sistemas integrados, donde usualmente la memoria de datos y programas comparten el mismo encapsulado que el procesador, este inconveniente deja de ser un problema serio y es por ello que encontramos la arquitectura Harvard en la mayoría de los microcontroladores.
Por eso es importante recordar que un microcontrolador se puede configurar de diferentes maneras, siempre y cuando se respete el tamaño de memoria que este requiera para su correcto funcionamiento.
Procesador en detalle
En los años 1970, la electrónica digital no estaba suficientemente desarrollada, pero dentro de la electrónica ya era una especialidad consagrada. En aquel entonces las computadoras se diseñaban para que realizaran algunas operaciones muy simples, y si se quería que estas máquinas pudiesen hacer cosas diferentes, era necesario realizar cambios bastante significativos al hardware.
A principios de la década de 1970, una empresa japonesa le encargó a una joven compañía norteamericana que desarrollara un conjunto de circuitos para producir una calculadora de bajo costo. Intel se dedicó de lleno a la tarea y entre los circuitos encargados desarrolló uno muy especial, algo no creado hasta la fecha: el primer microprocesador integrado.
El 4004 salió al mercado en 1971, es una máquina digital sincrónica compleja, como cualquier otro circuito lógico secuencial sincrónico. Sin embargo, la ventaja de este componente está en que aloja internamente un conjunto de circuitos digitales que pueden hacer operaciones corrientes para el cálculo y procesamiento de datos, pero desde una óptica diferente: sus entradas son una serie de códigos bien definidos, que permiten hacer operaciones de carácter específico cuyo resultado está determinado por el tipo de operación y los operandos involucrados.
Visto así, no hay nada de especial en un microprocesador; la maravilla está en que la combinación adecuada de los códigos de entrada, su ejecución secuencial, el poder saltar hacia atrás o adelante en la secuencia de códigos en base a decisiones lógicas u órdenes específicas, permite que la máquina realice un montón de operaciones complejas, no contempladas en los simples códigos básicos.
Hoy estamos acostumbrados a los sistemas con microprocesadores, pero en el “lejano” 1971 esta era una forma de pensar un poco diferente y hasta escandalosa, a tal punto que Busicom, la empresa que encargó los chips a INTEL, no se mostró interesada en el invento, así que INTEL puso manos a la obra y lo comercializó para otros que mostraron interés; y bueno, el resto de la historia: una revolución sin precedentes en el avance tecnológico de la humanidad.
Es lógico pensar que el invento del microprocesador integrado no fue una revelación divina para sus creadores, sino que se sustentó en los avances, existentes hasta el momento, en el campo de la electrónica digital y las teorías sobre computación. Pero sin lugar a dudas fue la gota que colmó la copa de la revolución científico-técnica, porque permitió desarrollar aplicaciones impensadas o acelerar algunas ya encaminadas.
Ahora comenzaremos a ver cómo es que está hecho un procesador, no será una explicación demasiado detallada porque desde su invención éste ha tenido importantes revoluciones propias, pero hay aspectos básicos que no han cambiado y que constituyen la base de cualquier microprocesador. En la Figura 'Esquema de un microcontrolador' podemos ver la estructura típica de un microprocesador, con sus componentes fundamentales, claro está que ningún procesador real se ajusta exactamente a esta estructura, pero aun así nos permite conocer cada uno de sus elementos básicos y sus interrelaciones.
Registros
Son un espacio de memoria muy reducido pero necesario para cualquier microprocesador, de aquí se toman los datos para varias operaciones que debe realizar el resto de los circuitos del procesador. Los registros sirven para almacenar los resultados de la ejecución de instrucciones, cargar datos desde la memoria externa o almacenarlos en ella.
Aunque la importancia de los registros parezca trivial, no lo es en absoluto. De hecho una parte de los registros, la destinada a los datos, es la que determina uno de los parámetros más importantes de cualquier microprocesador. Cuando escuchamos que un procesador es de 4, 8, 16, 32 o 64 bits, nos estamos refiriendo a procesadores que realizan sus operaciones con registros de datos de ese tamaño, y por supuesto, esto determina muchas de las potencialidades de estas máquinas.
Mientras mayor sea el número de bits de los registros de datos del procesador, mayores serán sus prestaciones, en cuanto a poder de cómputo y velocidad de ejecución, ya que este parámetro determina la potencia que se puede incorporar al resto de los componentes del sistema, por ejemplo, no tiene sentido tener una ALU de 16 bits en un procesador de 8 bits.
Por otro lado un procesador de 16 bits, puede que haga una suma de 16 bits en un solo ciclo de máquina, mientras que uno de 8 bits deberá ejecutar varias instrucciones antes de tener el resultado, aun cuando ambos procesadores tengan la misma velocidad de ejecución para sus instrucciones. El procesador de 16 bits será más rápido porque puede hacer el mismo tipo de tareas que uno de 8 bits, en menos tiempo.
Unidad de control
Esta unidad es de las más importantes en el procesador, en ella recae la lógica necesaria para la decodificación y ejecución de las instrucciones, el control de los registros, la ALU, los buses y cuanta cosa más se quiera meter en el procesador.
La unidad de control es uno de los elementos fundamentales que determinan las prestaciones del procesador, ya que su tipo y estructura, determina parámetros tales como el tipo de conjunto de instrucciones, velocidad de ejecución, tiempo del ciclo de máquina, tipo de buses que puede tener el sistema, manejo de interrupciones y un buen número de cosas más que en cualquier procesador van a parar a este bloque.
Por supuesto, las unidades de control, son el elemento más complejo de un procesador y normalmente están divididas en unidades más pequeñas trabajando de conjunto. La unidad de control agrupa componentes tales como la unidad de decodificación, unidad de ejecución, controladores de memoria cache, controladores de buses, controlador de interrupciones, pipelines, entre otros elementos, dependiendo siempre del tipo de procesador.
Unidad aritmético-lógica
Como los procesadores son circuitos que hacen básicamente operaciones lógicas y matemáticas, se le dedica a este proceso una unidad completa, con cierta independencia. Aquí es donde se realizan las sumas, restas, y operaciones lógicas típicas del álgebra de Boole.
Actualmente este tipo de unidades ha evolucionado mucho y los procesadores más modernos tienen varias ALU, especializadas en la realización de operaciones complejas como las operaciones en coma flotante. De hecho en muchos casos le han cambiado su nombre por el de “coprocesador matemático”, aunque este es un término que surgió para dar nombre a un tipo especial de procesador que se conecta directamente al procesador más tradicional.
Su impacto en las prestaciones del procesador es también importante porque, dependiendo de su potencia, tareas más o menos complejas, pueden hacerse en tiempos muy cortos, como por ejemplo, los cálculos en coma flotante.
Esto no siempre funciona, puesto que se necesita de un termoresistor para compensar su registro de memoria, por lo que este termoresistor se puede sustituir por un transductor se presencia, para que su memoria de registro no sea complaciente para su velocidad de registro.
Buses
Son el medio de comunicación que utilizan los diferentes componentes del procesador para intercambiar información entre sí, eventualmente los buses o una parte de ellos estarán reflejados en los pines del encapsulado del procesador.
En el caso de los microcontroladores, no es común que los buses estén reflejados en el encapsulado del circuito, ya que estos se destinan básicamente a las E/S de propósito general y periféricos del sistema.
Existen tres tipos de buses:
- Dirección: Se utiliza para seleccionar al dispositivo con el cual se quiere trabajar o en el caso de las memorias, seleccionar el dato que se desea leer o escribir.
- Datos.
- Control: Se utiliza para gestionar los distintos procesos de escritura lectura y controlar la operación de los dispositivos del sistema.
Conjunto de instrucciones
Aunque no aparezca en el esquema, no podíamos dejar al conjunto o repertorio de instrucciones fuera de esta fiesta, porque este elemento determina lo que puede hacer el procesador.
Define las operaciones básicas que puede realizar el procesador, que conjugadas y organizadas forman lo que conocemos como software. El conjunto de instrucciones vienen siendo como las letras del alfabeto, el elemento básico del lenguaje, que organizadas adecuadamente permiten escribir palabras, oraciones y cuanto programa se le ocurra.
Existen dos tipos básicos de repertorios de instrucciones, que determinan la arquitectura del procesador: CISC y RISC.
CISC, del inglés Complex Instruction Set Computer, Computadora de Conjunto de Instrucciones Complejo. Los microprocesadores CISC tienen un conjunto de instrucciones que se caracteriza por ser muy amplio y que permiten realizar operaciones complejas entre operandos situados en la memoria o en los registros internos. Este tipo de repertorio dificulta el paralelismo entre instrucciones, por lo que en la actualidad, la mayoría de los sistemas CISC de alto rendimiento, convierten las instrucciones complejas en varias instrucciones simples del tipo RISC, llamadas generalmente microinstrucciones.
Dentro de los microcontroladores CISC podemos encontrar a la popular familia INTEL -51 y la Z80, aunque actualmente existen versiones CISC-RISC de estos microcontroladores, que pretenden aprovechar las ventajas de los procesadores RISC a la vez que se mantiene la compatibilidad hacia atrás con las instrucciones de tipo CISC.
RISC, del inglés Reduced Instruction Set Computer, Computadora con Conjunto de Instrucciones Reducido. Se centra en la obtención de procesadores con las siguientes características fundamentales:
- Instrucciones de tamaño fijo.
- Pocas instrucciones.
- Sólo las instrucciones de carga y almacenamiento acceden a la memoria de datos.
- Número relativamente elevado de registros de propósito general.
Una de las características más destacables de este tipo de procesadores es que posibilitan el paralelismo en la ejecución, y reducen los accesos a memoria. Es por eso que los procesadores más modernos, tradicionalmente basados en arquitecturas CISC implementan mecanismos de traducción de instrucciones CISC a RISC, para aprovechar las ventajas de este tipo de procesadores.
Los procesadores de los microcontroladores PIC son de tipo RISC.
Memoria
Anteriormente habíamos visto que la memoria en los microcontroladores debe estar ubicada dentro del mismo encapsulado, esto es así la mayoría de las veces, porque la idea fundamental es mantener el grueso de los circuitos del sistema dentro de un solo integrado.
En los microcontroladores la memoria no es abundante, aquí no encontrará Gigabytes de memoria como en las computadoras personales. Típicamente la memoria de programas no excederá de 16 K-localizaciones de memoria no volátil (flash o eprom) para contener los programas.
La memoria RAM está destinada al almacenamiento de información temporal que será utilizada por el procesador para realizar cálculos u otro tipo de operaciones lógicas. En el espacio de direcciones de memoria RAM se ubican además los registros de trabajo del procesador y los de configuración y trabajo de los distintos periféricos del microcontrolador. Es por ello que en la mayoría de los casos, aunque se tenga un espacio de direcciones de un tamaño determinado, la cantidad de memoria RAM de que dispone el programador para almacenar sus datos es menor que la que puede direccionar el procesador.
El tipo de memoria utilizada en las memorias RAM de los microcontroladores es SRAM, lo que evita tener que implementar sistemas de refrescamiento como en el caso de las computadoras personales, que utilizan gran cantidad de memoria, típicamente alguna tecnología DRAM. A pesar de que la memoria SRAM es más costosa que la DRAM, es el tipo adecuado para los microcontroladores porque éstos poseen pequeñas cantidades de memoria RAM.
En el caso de la memoria de programas se utilizan diferentes tecnologías, y el uso de una u otra depende de las características de la aplicación a desarrollar, a continuación se describen las cinco tecnologías existentes, que mayor utilización tienen o han tenido:
- ROM de máscara. En este caso no se “graba” el programa en memoria sino que el microcontrolador se fabrica con el programa, es un proceso similar al de producción de los CD comerciales mediante masterización.
El costo inicial de producir un circuito de este tipo es alto, porque el diseño y producción de la máscara es un proceso costoso, sin embargo, cuando se necesitan varios miles o incluso cientos de miles de microcontroladores para una aplicación determinada, como por ejemplo, algún electrodoméstico, el costo inicial de producción de la máscara y el de fabricación del circuito se distribuye entre todos los circuitos de la serie y, el costo final de ésta, es bastante menor que el de sus semejantes con otro tipo de memoria.
- OTP One Time Programmable. Este tipo de memoria, también es conocida como PROM o simplemente ROM.
Los microcontroladores con memoria OTP se pueden programar una sola vez, con algún tipo de programador. Se utilizan en sistemas donde el programa no requiera futuras actualizaciones y para series relativamente pequeñas, donde la variante de máscara sea muy costosa, también para sistemas que requieren serialización de datos, almacenados como constantes en la memoria de programas.
- EPROM Erasable Programmable Read Only Memory. Los microcontroladores con este tipo de memoria son muy fáciles de identificar porque su encapsulado es de cerámica y llevan encima una ventanita de vidrio desde la cual puede verse la oblea de silicio del microcontrolador.
Se fabrican así porque la memoria EPROM es reprogramable, pero antes debe borrase, y para ello hay que exponerla a una fuente de luz ultravioleta, el proceso de grabación es similar al empleado para las memorias OTP. Al aparecer tecnologías menos costosas y más flexibles, como las memorias EEPROM y FLASH, este tipo de memoria han caído en desuso, se utilizaban en sistemas que requieren actualizaciones del programa y para los procesos de desarrollo y puesta a punto.
- EEPROM Electrical Erasable Programmable Read Only Memory. Fueron el sustituto natural de las memorias EPROM, la diferencia fundamental es que pueden ser borradas eléctricamente, por lo que la ventanilla de cristal de cuarzo y los encapsulados cerámicos no son necesarios.
Al disminuir los costos de los encapsulados, los microcontroladores con este tipo de memoria se hicieron más baratos y cómodos para trabajar que sus equivalentes con memoria EPROM. Otra característica destacable de este tipo de microcontrolador es que fue en ellos donde comenzaron a utilizarse los sistemas de programación en circuito o ICSP (In Circuit Serial Progamming) que evitan tener que sacar el microcontrolador de la tarjeta que lo aloja para hacer actualizaciones al programa.
- Flash. En el campo de las memorias reprogramables para microcontroladores, son el último avance tecnológico en uso a gran escala, y han sustituido a los microcontroladores con memoria EEPROM.
A las ventajas de las memorias flash se le adicionan su gran densidad respecto a sus predecesoras lo que permite incrementar la cantidad de memoria de programas a un costo muy bajo. Pueden además ser programadas con las mismas tensiones de alimentación del microcontrolador, el acceso en lectura y la velocidad de programación es superior, disminución de los costos de producción, entre otras. Lo más habitual es encontrar que la memoria de programas y datos está ubicada toda dentro del microcontrolador, de hecho, actualmente son pocos los microcontroladores que permiten conectar memoria de programas en el exterior del encapsulado. Las razones para estas “limitaciones” están dadas porque el objetivo fundamental es obtener la mayor integración posible y conectar memorias externas consume líneas de E/S que son uno de los recursos más preciados de los microcontroladores. A pesar de lo anterior existen familias como la INTEL 51 cuyos microcontroladores tienen la capacidad de ser expandidos en una variada gama de configuraciones para el uso de memoria de programas externa. En el caso de los PIC, estas posibilidades están limitadas sólo a algunos microcontroladores de la gama alta, la Figura 5 muestra algunas de las configuraciones para memoria de programa que podemos encontrar en los microcontroladores. La configuración (a) es la típica y podemos encontrarla casi en el 100% de los microcontroladores. La configuración (b) es poco frecuente y generalmente se logra configurando al microcontrolador para sacrificar la memoria de programas interna, sin embargo el 8031 de INTEL es un microcontrolador sin memoria de programas interna. La configuración (c) es la que se encuentra habitualmente en los microcontroladores que tienen posibilidades de expandir su memoria de programas como algunos PIC de gama alta.
Cuando se requiere aumentar la cantidad de memoria de datos, lo más frecuente es colocar dispositivos de memoria externa en forma de periféricos, de esta forma se pueden utilizar memorias RAM, FLASH o incluso discos duros como los de las PC, mientras que para los cálculos y demás operaciones que requieran almacenamiento temporal de datos se utiliza la memoria RAM interna del microcontrolador. Esta forma de expandir la memoria de datos está determinada, en la mayoría de lo casos, por el tipo de repertorio de instrucciones del procesador y porque permite un elevado número de configuraciones distintas, además del consiguiente ahorro de líneas de E/S que se logra con el uso de memorias con buses de comunicación serie.
Interrupciones
Las interrupciones son esencialmente llamadas a subrutina generadas por los dispositivos físicos, al contrario de las subrutinas normales de un programa en ejecución. Como el salto de subrutina no es parte del hilo o secuencia de ejecución programada, el controlador guarda el estado del procesador en la pila de memoria y entra a ejecutar un código especial llamado "manejador de interrupciones" que atiende al periférico específico que generó la interrupción. Al terminar la rutina, una instrucción especial le indica al procesador el fín de la atención de la interrupción. En ese momento el controlador reestablece el estado anterior, y el programa que se estaba ejecutando antes de la interrupción sigue como si nada hubiese pasado. Las rutinas de atención de interrupciones deben ser lo mas breves posibles para que el rendimiento del sistema sea satisfactorio, por que normalmente cuando una interrupción es atendida, todas las demás interrupciones están en espera.
Imagine que está esperando la visita de un amigo, al que llamaremos Juan. Usted y Juan han acordado que cuando él llegue a su casa esperará pacientemente a que le abra la puerta. Juan no debe tocar a la puerta porque alguien en la casa duerme y no quiere que le despierten.
Ahora usted ha decidido leer un libro mientras espera a que Juan llegue a la casa, y para comprobar si ha llegado, cada cierto tiempo detiene la lectura, marca la página donde se quedó, se levanta y va hasta la puerta, abre y comprueba si Juan ha llegado, si éste todavía no está en la puerta, esperará unos minutos, cerrará la puerta y regresará a su lectura durante algún tiempo.
Como verá este es un método poco eficiente para esperar a Juan porque requiere que deje la lectura cada cierto tiempo y vaya hasta la puerta a comprobar si él ha llegado, además debe esperar un rato si todavía no llega. Y por si fuera poco, imagine que Juan no llega nunca porque se le presentó un problema, tuvo que cancelar la cita y no pudo avisarle a tiempo, o peor, que Juan ha llegado a la puerta un instante después que usted la cerraba. Juan, respetando lo acordado, espera un tiempo, pero se cansa de esperar a que le abran y decide marcharse porque cree que ya usted no está en la casa o no puede atenderlo. A este método de atender la llegada de Juan lo llamaremos encuesta.
Veamos ahora otro método. En esta ocasión simplemente se recuesta en el sofá de la sala y comienza a leer su libro, cuando Juan llegue debe tocar el timbre de la puerta y esperar unos momentos a que le atiendan. Cuando usted oye sonar el timbre, interrumpe la lectura, marca la página donde se quedó y va hasta la puerta para atender a la persona que toca el timbre. Una vez que Juan o la persona que ha tocado el timbre, se marcha, usted regresa a su asiento y retoma la lectura justo donde la dejó. Este último es un método más eficiente que el anterior porque le deja más tiempo para leer y elimina algunos inconvenientes como el de que Juan nunca llegue o se marche antes de que usted abra la puerta. Es, en principio, un método simple pero muy eficaz y eficiente, lo llamaremos atención por interrupción.
El primero de ellos, la encuesta, es un método eficaz, pero poco eficiente porque requiere realizar lecturas constantes y muchas veces innecesarias del estado del proceso que queremos atender. Sin embargo, es muy utilizado en la programación de microcontroladores porque resulta fácil de aprender, la implementación de código con este método es menos compleja y no requiere de hardware especial para llevarla adelante. Por otra parte, la encuesta, tiene muchas deficiencias que con frecuencia obligan al diseñador a moverse hacia otros horizontes
El mundo está lleno de situaciones; de las cuales no podemos determinar ni cuando, ni como ni por qué se producen, en la mayoría de los casos lo único que podemos hacer es enterarnos de que determinada situación, asociada a un proceso, ha ocurrido. Para ello seleccionamos alguna condición o grupo de condiciones que nos indican que el proceso que nos interesa debe ser atendido, a este fenómeno, en el cual se dan las condiciones que nos interesa conocer, lo llamaremos evento. En el segundo ejemplo vemos que para atender a Juan, éste debe tocar el timbre, por tanto, la llegada de Juan es el proceso que debemos atender y el sonido del timbre es el evento que nos indica que Juan ha llegado.
El método de atención a procesos por interrupción, visto desde la óptica del ejemplo que utilicé para mostrarlo, es más simple que el de la encuesta, pero no es cierto, el método se complica porque requiere que el microprocesador incorpore circuitos adicionales para registrar los eventos que le indican que debe atender al proceso asociado y comprender estos circuitos y su dinámica no es una tarea sencilla.
Los circuitos para la atención a las interrupciones y todas las tareas que debe realizar el procesador para atender al proceso que lo interrumpe son bastante complejos y requieren una visión diferente de la que estamos acostumbrados a tener de nuestro mundo.
Los seres humanos no estamos conscientes de las interrupciones, en nuestro organismo existen mecanismos que nos interrumpen constantemente, para ello tenemos a nuestro sistema sensorial, pero no somos conscientes del proceso de interrupción, aunque sí de la atención a las interrupciones. Eso es porque incorporamos mecanismos que nos sacan rápidamente de la tarea que estemos haciendo para atender una situación que no puede o no debe esperar mucho tiempo. Bien, esa misma es la idea que se incorpora en los microprocesadores para atender procesos que no pueden esperar o que no sabemos cuando deben ser atendidos porque ello depende de determinadas condiciones.
La cosa se complica en la secuencia de acciones a realizar desde el momento en que se desencadena el proceso de interrupción, hasta que se ejecuta el programa que lo atiende, y en la secuencia de acciones posteriores a la atención. Piense en cuantas cosas debe hacer su organismo ante una interrupción, utilicemos el segundo ejemplo para atender la llegada de Juan. Piense en cuantas cosas su cerebro hace a espaldas de su conciencia, desde el momento en que suena el timbre hasta que usted se encuentra listo (consciente de que es probable que Juan ha llegado) para abrir la puerta, y todo lo que su cerebro debe trabajar para retomar la lectura después que Juan se ha marchado. Todo eso, excepto abrir la puerta y atender a Juan, lo hacemos de forma “inconsciente” porque para ello tenemos sistemas dedicados en nuestro organismo, pero en el mundo de los microcontroladores debemos conocer todos esos detalles para poder utilizar los mecanismos de interrupción.
Los procesos de atención a interrupciones tienen la ventaja de que se implementan por hardware ubicado en el procesador, así que es un método rápido de hacer que el procesador se dedique a ejecutar un programa especial para atender eventos que no pueden esperar por mecanismos lentos como el de encuesta.
En términos generales, un proceso de interrupción y su atención por parte del procesador, tiene la siguiente secuencia de acciones:
- En el mundo real se produce el evento para el cual queremos que el procesador ejecute un programa especial, este proceso tiene la característica de que no puede esperar mucho tiempo antes de ser atendido o no sabemos en que momento debe ser atendido.
- El circuito encargado de detectar la ocurrencia del evento se activa, y como consecuencia, activa la entrada de interrupción del procesador.
- La unidad de control detecta que se ha producido una interrupción y “levanta” una bandera para registrar esta situación; de esta forma si las condiciones que provocaron el evento desaparecen y el circuito encargado de detectarlo desactiva la entrada de interrupción del procesador, ésta se producirá de cualquier modo, porque ha sido registrada.
- La unidad de ejecución termina con la instrucción en curso y justo antes de comenzar a ejecutar la siguiente comprueba que se ha registrado una interrupción
- Se desencadena un proceso que permite guardar el estado actual del programa en ejecución y saltar a una dirección especial de memoria de programas, donde está la primera instrucción de la subrutina de atención a interrupción.
- Se ejecuta el código de atención a interrupción, esta es la parte “consciente” de todo el proceso porque es donde se realizan las acciones propias de la atención a la interrupción y el programador juega su papel.
- Cuando en la subrutina de atención a interrupción se ejecuta la instrucción de retorno, se desencadena el proceso de restauración del procesador al estado en que estaba antes de la atención a la interrupción.
Como podemos observar, el mecanismo de interrupción es bastante complicado, sin embargo tiene dos ventajas que obligan a su implementación: la velocidad y su capacidad de ser asincrónico. Ambas de conjunto permiten que aprovechemos al máximo las capacidades de trabajo de nuestro procesador.
Los mecanismos de interrupción no solo se utilizan para atender eventos ligados a procesos que requieren atención inmediata sino que se utilizan además para atender eventos de procesos asincrónicos.
Las interrupciones son tan eficaces que permiten que el procesador actúe como si estuviese haciendo varias cosas a la vez cuando en realidad se dedica a la misma rutina de siempre, ejecutar instrucciones una detrás de la otra.
Periféricos
Cuando observamos la organización básica de un microcontrolador, señalamos que dentro de este se ubican un conjunto de periféricos, cuyas salidas están reflejadas en los pines del microcontrolador. A continuación describiremos algunos de los periféricos que con mayor frecuencia encontraremos en los microcontroladores.
Entradas y salidas de propósito general
También conocidos como puertos de E/S, generalmente agrupadas en puertos de 8 bits de longitud, permiten leer datos del exterior o escribir en ellos desde el interior del microcontrolador, el destino habitual es el trabajo con dispositivos simples como relés, LED, o cualquier otra cosa que se le ocurra al programador.
Algunos puertos de E/S tienen características especiales que le permiten manejar salidas con determinados requerimientos de corriente, o incorporan mecanismos especiales de interrupción para el procesador.
Típicamente cualquier pin de E/S puede ser considerada E/S de propósito general, pero como los microcontroladores no pueden tener infinitos pines, ni siquiera todos los pines que queramos, las E/S de propósito general comparten los pines con otros periféricos. Para usar un pin con cualquiera de las características a él asignadas debemos configurarlo mediante los registros destinados a ellos.
Temporizadores y contadores
Son circuitos sincrónicos para el conteo de los pulsos que llegan a su para poder conseguir la entrada de reloj. Si la fuente de un gran conteo es el oscilador interno del microcontrolador es común que no tengan un pin asociado, y en este caso trabajan como temporizadores. Por otra parte, cuando la fuente de conteo es externa, entonces tienen asociado un pin configurado como entrada, este es el modo contador.
Los temporizadores son uno de los periféricos más habituales en los microcontroladores y se utilizan para muchas tareas, como por ejemplo, la medición de frecuencia, implementación de relojes, para el trabajo de conjunto con otros periféricos que requieren una base estable de tiempo entre otras funcionalidades. Es frecuente que un microcontrolador típico incorpore más de un temporizador/contador e incluso algunos tienen arreglos de contadores. Como veremos más adelante este periférico es un elemento casi imprescindible y es habitual que tengan asociada alguna interrupción. Los tamaños típicos de los registros de conteo son 8 y 16 bits, pudiendo encontrar dispositivos que solo tienen temporizadores de un tamaño o con más frecuencia con ambos tipos de registro de conteo.
Conversor analógico/digital
Como es muy frecuente el trabajo con señales analógicas, éstas deben ser convertidas a digital y por ello muchos microcontroladores incorporan un conversor analógico-digital, el cual se utiliza para tomar datos de varias entradas diferentes que se seleccionan mediante un multiplexor.
Las resoluciones más frecuentes son 8 y 10 bits, que son suficientes para aplicaciones sencillas. Para aplicaciones en control e instrumentación están disponibles resoluciones de 12bit, 16bit y 24bit Ejemplo:microcontroladores "analógicos". También es posible conectar un convertidor externo, en caso de necesidad.
Puertos de comunicación
Puerto serie
Este periférico está presente en casi cualquier microcontrolador, normalmente en forma de UART (Universal Asynchronous Receiver Transmitter) o USART (Universal Synchronous Asynchronous Receiver Transmitter) dependiendo de si permiten o no el modo sincrónico de comunicación.
El destino común de este periférico es la comunicación con otro microcontrolador o con una PC y en la mayoría de los casos hay que agregar circuitos externos para completar la interfaz de comunicación. La forma más común de completar el puerto serie es para comunicarlo con una PC mediante la interfaz EIA-232 (más conocida como RS-232), es por ello que muchas personas se refieren a la UART o USART como puerto serie RS-232, pero esto constituye un error, puesto que este periférico se puede utilizar para interconectar dispositivos mediante otros estándares de comunicación. En aplicaciones industriales se utiliza preferiblemente RS-485 por sus superior alcance en distancia, velocidad y resistencia al ruido.
SPI
Este tipo de periférico se utiliza para comunicar al microcontrolador con otros microcontroladores o con periféricos externos conectados a él, por medio de una interfaz muy sencilla . Hay solo un nodo controlador que permite iniciar cualquier transacción, lo cual es una desventaja en sistemas complejos, pero su sencillez permite el aislamiento galvánico de forma directa por medio de optoacopladores.
I2C
Cumple las mismas funciones que el SPI, pero requiere menos señales de comunicación y cualquier nodo puede iniciar una transacción. Es muy utilizado para conectar las tarjetas gráficas de las computadores personales con los monitores, para que estos últimos informen de sus prestaciones y permitir la autoconfiguración del sistema de video.
USB
Los microcontroladores son los que han permitido la existencia de este sistema de comunicación. Es un sistema que trabaja por polling (monitoreo) de un conjunto de periféricos inteligentes por parte de un amo, que es normalmente un computador personal. Cada nodo inteligente está gobernado inevitablemente por un microcontrolador.
Ethernet
Es el sistema más extendido en el mundo para redes de área local cableadas. Los microcontroladores más poderosos de 32 bits se usan para implementar periféricos lo suficientemente poderosos como para que puedan ser accesados directamente por la red. Muchos de los enrutadores caseros de pequeñas empresas están construidos en base a un microcontrolador que hace del cerebro del sistema.
Can
Este protocolo es del tipo CSMA/CD con tolerancia a elevados voltajes de modo común y orientado al tiempo real. Este protocolo es el standar mas importante en la industria automotriz (OBD). También se usa como capa física del "field bus" para el control industrial.
Otros puertos de comunicación
Hay una enorme cantidad de otros buses disponibles para la industria automotriz (linbus) o de medios audiovisuales como el i2s, IEEE_1394. Es usuario se los encontrará cuando trabaje en algún area especializada.
Comparadores
Son circuitos analógicos basados en amplificadores operacionales que tienen la característica de comparar dos señales analógicas y dar como salida los niveles lógicos ‘0’ o ‘1’ en dependencia del resultado de la comparación. Es un periférico muy útil para detectar cambios en señales de entrada de las que solamente nos interesa conocer cuando está en un rango determinado de webetas
Modulador de ancho de pulsos
Los PWM (Pulse Width Modulator) son periféricos muy útiles sobre todo para el control de motores, sin embargo hay un grupo de aplicaciones que pueden realizarse con este periférico, dentro de las cuales podemos citar: inversión DC/AC para UPS ,conversión digital analógica D/A, control regulado de luz (dimming) entre otras.
Memoria de datos no volátil
Muchos microcontroladores han incorporado este tipo de memoria como un periférico más, para el almacenamiento de datos de configuración o de los procesos que se controlan. Esta memoria es independiente de la memoria de datos tipo RAM o la memoria de programas, en la que se almacena el código del programa a ejecutar por el procesador del microcontrolador.
Muchos de los microcontroladores PIC, incluyen este tipo de memoria, típicamente en forma de memoria EEPROM, incluso algunos de ellos permiten utilizar parte de la memoria de programas como memoria de datos no volátil, por lo que el procesador tiene la capacidad de escribir en la memoria de programas como si ésta fuese un periférico más.
Familias de microcontroladores
Los microcontroladores más comunes en uso son:
Empresa 8 bits 12 bits 14 bits 16 bits 32 bits 64 bits Observaciones Atmel AVR (mega y tiny),89Sxxxx familia similar 8051 SAM7 (ARM7TDMI), SAM3 (ARM Cortex-M3), SAM9 (ARM926) Freescale
(antes Motorola)68HC05, 68HC08, 68HC11, HCS08 x x 68HC12, 68HCS12, 68HCSX12, 68HC16 683xx, PowerPC Architecture,ColdFire x x Holtek HT8 Intel MCS-48 (familia 8048)
MCS51 (familia 8051)
8xC251x x MCS96, MXS296 x x x National Semiconductor COP8 x x x x x x Microchip Familia 10f2xx Familia 12Cxx Familia 12Fxx, 16Cxx y 16Fxx 18Cxx y 18Fxx PIC24F, PIC24H y dsPIC30FXX,dsPIC33F con motor dsp integrado PIC32 x x NXP
(antes Philips)80C51 XA Cortex-M3, Cortex-M0, ARM7, ARM9 Parallax Renesas
(antes Hitachi, Mitsubishi y NEC)78K,H8 H8S,78K0R,R8C,R32C/M32C/M16C RX,V850,SuperH,SH-Mobile,H8SX x x STMicroelectronics ST 62,ST 7 Texas Instruments TMS370, MSP430 C2000, Cortex-M3 (ARM) , TMS570 (ARM) Zilog Z8, Z86E02 Silabs C8051 Observación: Algunas arquitecturas de microcontrolador están disponibles por tal cantidad de vendedores y en tantas variedades, que podrían tener, con total corrección, su propia categoría. Entre ellos encontramos, principalmente, las variantes de 8051 y Z80. ass
Véase también
- Lista de microcontroladores comunes
- Controladora de periférico
- Microprocesador
- Microbótica
- PIC16F87X
- Intel HEX
- Informática de sistemas
- Ingeniería Técnica en Informática de Gestión
Enlaces externos
Categoría:- Microcontroladores

Wikimedia foundation. 2010.