- Radar meteorológico
-
Radar meteorológico
Un radar meteorológico, o radar meteo, es un tipo de radar usado en meteorología para localizar lluvias, calcular sus trayectorias y estimar sus tipo (lluvia, nieve, granizo, etc.). Además, los datos tridimensionales pueden analizarse para extraer la estructura de las tormentas y su potencial de trayectoria y de daño. Finalmente, los ecos de precipitaciones y de atmósfera clara del radar meteo permiten estimar la dirección y velocidad del viento en las zonas bajas de la atmósfera.
El "radar meteo" suele usarse junto con detectores de rayos, para ubicar la actividad mayor de una tormenta.
 Radar meteo en Norman, Oklahoma, con domo antilluvia (NOAA)
Radar meteo en Norman, Oklahoma, con domo antilluvia (NOAA)
 Sin el domo, un disco de radar meteo WF44
Sin el domo, un disco de radar meteo WF44Historia
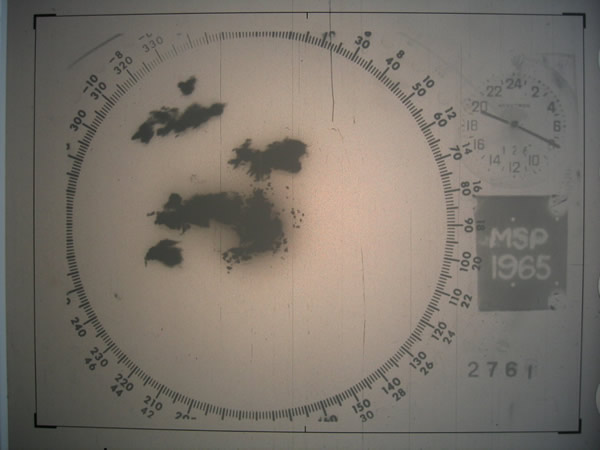
 Imagen de radar con tecnología de 1960, detectando superceldas de tornados sobre el área metropolitana de Minneapolis-Saint Paul
Imagen de radar con tecnología de 1960, detectando superceldas de tornados sobre el área metropolitana de Minneapolis-Saint Paul- En la Segunda Guerra Mundial, los operadores de radar notaban ruido en ecos de retorno debido a elementos meteorológicos (lluvia, nieve, cellisca, etc.)
- Poco después del conflicto, los científicos militares volvían a la vida civil o continuaban en las Fuerzas Armadas, investigando el desarrollo de uso de aquellos ecos:
-
- En EE.UU.: David Atlas,[1] Fuerza Aérea de EE.UU., y el grupo que primero y más tarde lideró los primeros radares meteo MIT.
- En Canadá : J.S. Marshall y R.H. Douglas forman el «Grupo de Tiempo Tormentoso»[2] en Montreal. : Marshall y, el estudiante de doctorado, Walter Palmer son bien conocidos por su trabajo sobre el tamaño de gotas y su distribución en latitudes medias de la lluvia que fijan la relación lluvia - reflectividad al radar (relación Z-R)
- En Gran Bretaña: continuaron los estudios de patrones de "ecos de radar y tiempo" (lluvias estratiformas, nubes convectivas, etc.) y experimentos evaluando el potencial de diferentes longitudes de onda de 1 a 10 cm
- 1953, Donald Staggs, ingeniero eléctrico trabajando para Illinois State Water Survey, realiza las primeras observaciones de radar de un "eco en cadena" asociado con una tormenta tornádica.[3]
- Entre 1950 y 1980, los radares de reflectividad (que dan posición e intensidad de la lluvia) se construyeron por los Servicios Meteorológicos de países muy desarrollados. Los meteorólogos tenían que observar con tubo de rayos catódicos.
-
- En los años 1970, los radares se estandarizan y se organizan en redes. Se desarrolla el primer artefacto para capturar imágenes de radar. El Nº de ángulos escaneados sube para obtener vistas tridimensionales de la lluvia, se mejoran los barridos horizontales (CAPPI) y verticales. Estudios de la organización de tormentas se hacen posible con el Proyecto Alberta Hail y el NSSL en EE.UU. El NSSL se crea en 1964, comenzando a experimentar sobre señales de polarización dual y en usos de Efecto Doppler (ver Radar Doppler.
- Entre 1980 y 2000, las redes de radares meteo son norma en Norteamérica, Europa, Japón y otros países desarrollados. Los radares convencionales son reemplazados por los Doppler para añadir información sobre velocidad. En EE.UU., desde 1988, la red son radares de longitud de onda de 1 dm, los NEXRAD ó WSR-88D.
En Canadá, la "Environment Canada" construye la estación King City,[4] con un radar Doppler de 5 cm, en 1985; y la Universidad McGill doppleriza ese radar (CWMN) en 1993. Así completa la Red Canadiense de Radares Meteo[5] entre 1998 y 2004. Francia y otros países europeos cambian a redes Doppler a finales de los años 1990 y principios de los 2000.
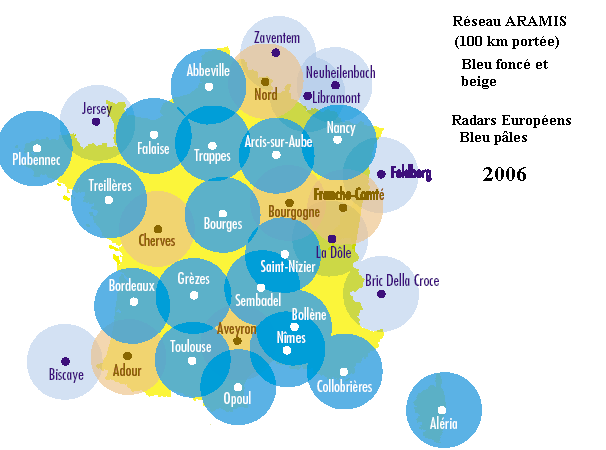
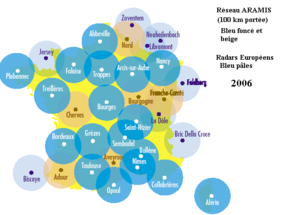 Red francesa de radares meteo
Red francesa de radares meteoSe desarrollan computadoras para procesar los algoritmos de detección de signos de tiempo severo.
- Después de 2000, la investigación de la polarización dual pasa al uso de información adicional para tipificar precipitaciones.
Los Radares se actualizan hacia fines de los años 1990 en EE.UU, Francia,[6] y Canadá.
- Desde 2003, NOAA experimenta con radar de fase, reemplazando las antenas convencionales parabólicas para dar más resolución temporal al ruido atmosférico. Esto podría ser muy importante en tormentas severas, dando su evolución con mejor evaluación de los datos temporales.
Principios del radar en meteorología
Pulso en microonda electromagnética (orden del microsegundo)
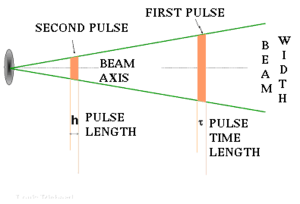 Trayectoria del haz y volumen escaneado
Trayectoria del haz y volumen escaneadoLos radares meteo son radares de pulso. El generador de microonda es usualmente un magnetrón ó un klistrón con 1 a 10 cm de ancho de banda. La onda es transmitida por una "guía de ondas" a una antena parabólica, y hacia el blanco.
Las longitudes de onda desde 1 a 10 cm son aproximadamente diez veces el diámetro de las gotitas de agua o partículas de hielo de interés, debido a la dispersión de Rayleigh que ocurre a esas frecuencias. Esto significa que parte de la energía de cada pulso rebote en esas pequeñas partículas, volviendo en la dirección de la estación de radar.[7]
Las longitudes de onda más cortas se usan útilmente para partículas más diminutas, pero la señal es más rápidamente atenuada. Así el radar de 1 dm en banda S es preferido pero es más caro que el sistema de 5 cm en banda C. El radar de 3 cm en banda X r se usa solo para propósitos en muy cortas distancias, y el radar meteo de 1 cm en banda Ka se usa solo para estudios en fenómenos de pequeñas partículas como niebla.[7]
A diferencia del radar de vuelo, el radar meteo tiene un blanco numeroso en volumen, haz del radar:
 (h ancho del pulso, r distancia al radar y Θ ancho de haz). El radar de pulsos se expande a medida que sale de la fuente. Esto significa que la región de atmósfera donde un pulso se mueve a través de un área cada vez mayor a medida se aleja de la estación, y más pequeña en áreas cercanas, decreciendo la resolución a distancias grandes. Al fondo de los 150-200 km del rango de iluminación, el volumen de aire escaneado por un solo pulso puede estar en el orden de kilómetros cúbicos. Esto se llama volumen del pulso[8]
(h ancho del pulso, r distancia al radar y Θ ancho de haz). El radar de pulsos se expande a medida que sale de la fuente. Esto significa que la región de atmósfera donde un pulso se mueve a través de un área cada vez mayor a medida se aleja de la estación, y más pequeña en áreas cercanas, decreciendo la resolución a distancias grandes. Al fondo de los 150-200 km del rango de iluminación, el volumen de aire escaneado por un solo pulso puede estar en el orden de kilómetros cúbicos. Esto se llama volumen del pulso[8]Con un radar típico de pulso y su ancho de haz, el volumen escaneado varía grandemente, hasta 250 ó 300 km. Por ej., el retorno de una distancia dada será promedio de los ecos en un volumen del orden de 1 km³ de aire. El volumen de aire para un pulso en un punto en un tiempo puede aproximadamente calcularse por la fórmula
 , donde v es el volumen encerrado por el pulso, h es el ancho del pulso (en e.g. metros, calculados de la duración en segundos del pulso a la velocidad de la luz), r es la distancia desde el radar al pulso que está propagándose (en e.g. metros), y
, donde v es el volumen encerrado por el pulso, h es el ancho del pulso (en e.g. metros, calculados de la duración en segundos del pulso a la velocidad de la luz), r es la distancia desde el radar al pulso que está propagándose (en e.g. metros), y  es el ancho del rayo (en radianes). Esta fórmula asume que el haz es simétricamente circular, "r" es mucho mayor que "h" sobre "r" tomado al inicio o al final del pulso es prácticamente lo mismo, y la forma del volumen es un cono frustum de profundidad "h".[7]
es el ancho del rayo (en radianes). Esta fórmula asume que el haz es simétricamente circular, "r" es mucho mayor que "h" sobre "r" tomado al inicio o al final del pulso es prácticamente lo mismo, y la forma del volumen es un cono frustum de profundidad "h".[7]Ecuación para un radar con blancos meteorológicos
Debido a que los blancos varían en volumen, la Ecuación del Radar se desarrolla:[9]
donde
 es potencia recibida,
es potencia recibida,  es potencia trasmitida,
es potencia trasmitida,  es la ganancia de la antena trasmisora,
es la ganancia de la antena trasmisora,  es el ancho de banda del radar,
es el ancho de banda del radar,  es la sección eficaz del blanco de radar,
es la sección eficaz del blanco de radar,  es la distancia del trasmisor al blanco.
es la distancia del trasmisor al blanco.En este caso, hay que agregar las secciones eficaces a todos los blancos:
donde
 es la velocidad de la luz,
es la velocidad de la luz,  es la duración del pulso y es el ancho del haz medido en radianes.
es la duración del pulso y es el ancho del haz medido en radianes.Combinando las dos ecuaciones:
Donde lidera a:
Notar que el retorno ahora varía inversamente a
 en vez de
en vez de  .
.Comparando los datos viniendo de diferentes distancias al radar, se las ha normalizado con esta relación.
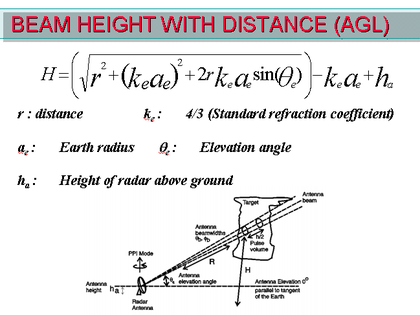
Determinación de alturas
Asumiendo a la Tierra redonda, conociendo la variación del índice de refracción a través del aire, y la distancia al blanco, se puede calcular la altura tierra-blanco.
Después de cada rotación de escaneo, la elevación de la antena se cambia para el siguiente sondaje. Este escenario se repite en muchos ángulos en orden a escanear todo el volumen de aire alrededor del radar dentro de su rango máximo. Usualmente, esta estrategia de escaneado se completa entre 5 a 10 min para tener datos entre 15 km arriba del terreno y 120-250-500 km de distancia al radar.
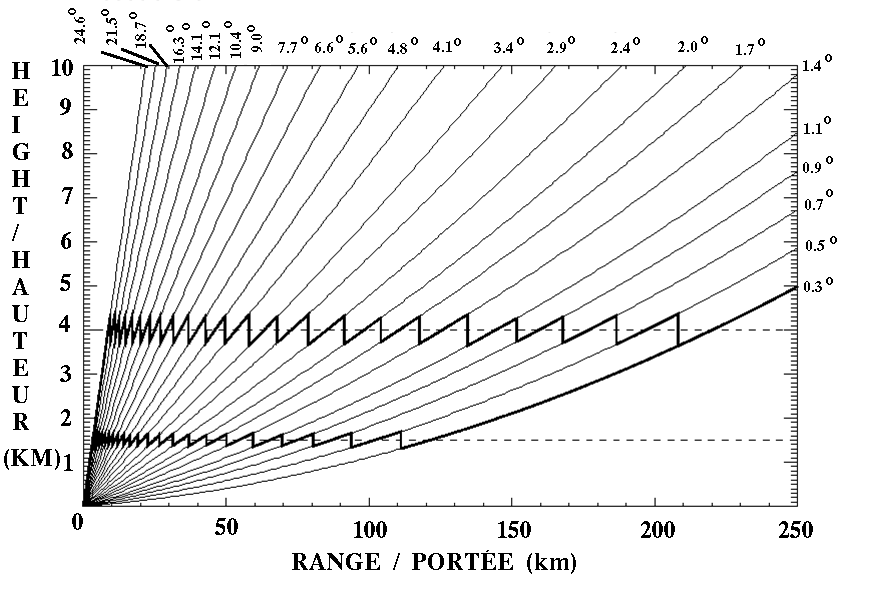
Debido a la curvatura terráquea y a cambios del índice de refracción con la altura, el radar no puede “ver” debajo de la altura del mínimo ángulo. Más adelante se muestra una imagem de alturas de una serie de típicos ángulos hechos por un radar meteo de 5 cm de Canadá. El rango va de 0,3 a 25 grados.
Tiempo de escucha receptiva (~ 1 ms)
 Altura de ecos por encima del horizonte
Altura de ecos por encima del horizonteEntre cada pulso, la antena se comporta como receptor para recibir el retorno del blanco. La distancia se calcula:
- distancia = c x Δ t /2 (c = velocidad de la luz).
Así el rango máximo no ambiguo depende de Δ t entre pulsos. Cualquier pulso retornando después de que uno nuevo se ha emitido será perdido, como si se asumiera que proviene del 2º (siguiente) pulso.
Asumida la redondez terráquea, la variación del índice de refracción a través del aire y la distancia al blanco, se calcula la altura desde el horizonte.
Estrategia de escaneado
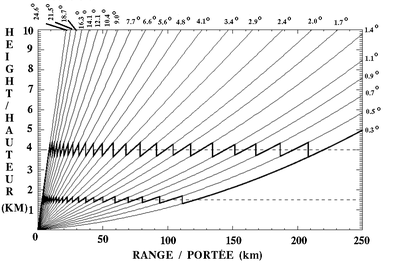 Típicos ángulos de escaneo en Canadá
Típicos ángulos de escaneo en Canadá. El zigzag representa la data de ángulos usados para hacer CAPPIs (Indicaciones Radáricas de Plan de Posición de Altitud Constante) entre 1,5 y 4 km de altitud)
Después de cada rotación de escaneo, la elevación (azimut de la antena se cambia para el siguiente sondeo. Este escenario se repite en muchos ángulos de modo de escanear el máximo del volumen atmosférico alrededor del radar meteo, con el máximo alcance. Usualmente, la estrategia de escaneo se completa en 5 a 10 min para resolver datos entre 0 y 15 km de altitud y 120-240-480 km de distancia del radar.
Debido a la curvatura de la Tierra y a cambios del índice de refracción con la altitud, el radar queda “ciego” debajo de una altura dada por el ángulo mínimo o cerrado al radar que su máximo. La imagen muestra la altura de una serie de ángulos típicos en un dardar meteo de 5 cm en Canadá; va de 0,3 a 25º.
Tipos de datos
Reflectividad (en decibel o dBZ)
- Los ecos, proveniente del reflejo sobre los blancos detectados, es analizado de acuerdo a sus intensidades para establecer los indices de precipitaciones del volumen explorado. La longitud de onda utilizada (1 a 10 cm) asegura que el reflejo será proporcional al índice, dado que está en el rango de la dispersión de Rayleigh, que indica que los blancos deben ser mucho mas pequeños que la longitud de onda con la cual se explora (por un factor de 10).[7]
La reflectividad (Z) varia de acuerdo a la sexta potencia del diámetro de las gotas de lluvia (D) y al cuadrado de la constante dieléctrica (K) del blanco. A medida que la distribución de las gotas (N[D]) es una función gamma truncada[10]
y su ecuación toma la siguiente forma:
- Z =
 |K|2 N0e − Λ D / D0 D6dD
|K|2 N0e − Λ D / D0 D6dD
El índice de precipitaciones (R), por otro lado, depende del número de partículas, su volumen, y su velocidad de caída (v[D]), de la siguiente forma:
- R = N0e − Λ D / D0 (πD³/6) v(D)dD
Por lo tanto, Z y R están correlacionadas por:
- Z = aRb
Donde a y b dependen del tipo de precipitaciones (nieve, lluvia, stratus o convección), quienes presentan distinto Λ, K, N0 y v.
- A medida que la antena barre la atmósfera, en cada ángulo de acimut obtiene de cada blanco encontrado un valor determinado de retorno. La reflectividad es promediada para ese blanco para aproximar mejor el conjunto de valores obtenidos.
- Dado que la variación del diámetro y constante dieléctrica de los blancos pueden producir una gran variabilidad en la intensidad de retorno del radar detectado, la reflectividad es expresada en dBZ (10 veces el logaritmo de la relación con el eco de una gota estándar de 1 mm de diámetro ocupando el mismo volumen rastreado).
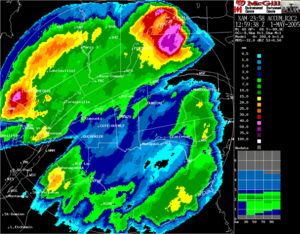
Como leer reflectividad en un monitor de radar
Los retornos de radar se representan usualmente por color o nivel. Los colores en una imagen de radar normalmente van del azul o verde para los retornos débiles, al rojo o magenta para los muy fuertes. Los números en un reporte oral se incrementan con la severidad de los retornos.
Por ejemplo, el U.S. National Doppler Radar usa la siguiente escala para los diferentes niveles de reflectividad:[1]
- magenta: 65 dBZ (extremadamente pesada precipitación)
- rojo: 52 dBZ
- amarillo: 36 dBZ
- verde: 20 dBZ (ligera precipitación)
Los retornos fuertes (rojo o magenta) pueden indicar no solo lluvia pesada, sino también tormentas, granizo, vientos fuertes, o tornados, pero se requerirá una cuidadosa interpretación, por razones descritas más adelante en este artículo.
Convenciones de aviación
Cuando se describen los retornos del radar meteo, los pilotos, despachantes, y controladores del tráfico aéreo se refieren a tres niveles de retorno:[2]
- nivel 1 corresponde al retorno verde, indicando usualmente ligera precipitación y poca a nada de turbulencia, y con la posibilidad de visibilidad reducida.
- nivel 2 corresponde al retorno amarillo, indica moderada precipitación, con la posibilidad de muy baja visibilidad, moderada turbulencia e inconfortabilidad para los pasajeros.
- nivel 3 corresponde al retorno rojo, indica precipitación pesada, con la posibilidad de tormentas y severa turbulencia, con daños serios estructurales a la aeronave.
Los aviones deben tratar de evitar el nivel 2 cuando es posible, y obviar el nivel 3 a menos de contar con una aeronave especialmente diseñada.
Velocidad
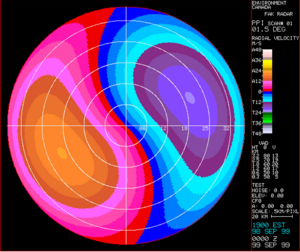 Ej. idealizado de salida Doppler. Las velocidades de aproximación en azul y las de alejamiento en rojo. Note la variación sinuosidal de velocidad cuando da vueltas al display en un particular anillo. (Fuente: Environment Canada)
Ej. idealizado de salida Doppler. Las velocidades de aproximación en azul y las de alejamiento en rojo. Note la variación sinuosidal de velocidad cuando da vueltas al display en un particular anillo. (Fuente: Environment Canada)Véase también: Pulse-doppler radar y radar Doppler
Pares de pulsos
La diferencia de frecuencia del retorno de una lluvia en movimiento con sus gotículas de agua o copos de nieve son demasiado pequeñas para notarse con los actuales instumentos electrónicos. Con velocidades de menos de 70 m/s para ecos de tiempo y longitudes de onda de radar de 1 dm, cuenta solo 10-5%. Sin embargo, como se mueven ligeramente entre cada pulso, la onda de retorno tiene una diferencia no despreciable de fase de pulso en pulso.
Los radares Doppler usan esta diferencia de fase (diferencia de pares de pulso) para calcular el movimiento de las precipitaciones. La intensidad de pulsos succesivamente retornando del mismo volumen escaneado donde los blancos tienen un ligerísimo movimiento es :

So
v = velocidad del blanco =

Esta velocidad se llama la velocidad radial Doppler, debido a que da solo la variación radial de la distancia versus el tiempo entre el radar y el blanco. La velocidad y dirección real de los movimientos tiene que ser extraída por el proceso descrito más abajo.
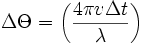
Dilema Doppler
 El máximo rango (rojo) y las variaciones de velocidades no ambiguas Doppler (azul), con Tasa de Repetición de Pulsos
El máximo rango (rojo) y las variaciones de velocidades no ambiguas Doppler (azul), con Tasa de Repetición de PulsosSi ahora se mira la máxima velocidad que puede deducirse de los pares de pulsos, puede variar un seno de -π y de +π, por lo que no se puede resolver una velocidad más grande que:
- Vmax =


Esta es llamada la velocidad Nyquist. Es inversamente proporcional al tiempo entre pulsos sucesivos: la más perqueña ya está, la más grande será el rango no ambiguo de velocidad. Sin embargo, se sabe que el máximo rango de la reflectividad es inversamente dependiente de Δt:
- x =

Luego hay un dilema : incrementando el rango de la reflectividad a expensas de la definición de velocidad o incrementando lo último a expensas del rango. Con las longitudes de onda usadas, el compromiso ha sido usar una Tasa de Repetición de Pulsos que da un rango de 100 a 150 km. Esto significa para una longitud de onda d 5 cm, como la de la imagen, un rango de velocidad no ambigua de 8,3-12,5 m/s pero del doble para un radar de 1 dm como los NEXRAD:.[7]
Interpretación Doppler
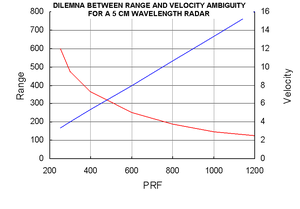
 Componente radial de vientos reales al escanearlos 360 º
Componente radial de vientos reales al escanearlos 360 ºSi uno piensa en una lluvia de otoño uniformemente caída, la cobertura del área del radar se mueve de oeste a este. Si el rayo radárico apunta hacia el oeste, “verá” las gotas de lluvia moviéndose hacia uno mientras se mira al este, y parecerá que se dirige al este. Por otro lado, cuando "mira" al norte o al sur, mientras no hay movimiento hacia el radar en aquellas direcciones, la velocidad radial es nula.[7]
Como el rayo escanea 360º alrededor del radar, los datos vendrán de todos aquellos ángulos y se proyectarán radialmente, como si el viento real viniera desde un ángulo individual. El patrón de intensidad formado por este escaneo será un coseno. Uno puede deducir la dirección y la fuerza de la velocidad de las partículas tanto si hay suficiente cobertura de la pantalla de radar.
Sin embargo, las gotas de lluvia están cayendo. Como el radar ve solo la componente radial y tiene una cierta elevación del suelo, las velocidades radiales se contaminarán por alguna fracción de la velocidad de caída. Afortunadamente, este componente es insignificante en ángulos de elevación pequeños, pero debe ser tenido en cuenta para ángulos de escaneo más altos.[7]
Polarización
 Haciendo blanco con polarización dual, que revela la forma de la gota
Haciendo blanco con polarización dual, que revela la forma de la gotaMuchos hidrometeoros tienen un eje más grande horizontal debido al coeficiente de resistencia aerodinámica del aire mientras caen (las gotas de agua). Esto causa que las moléculas dipolo de agua se orienten en tal dirección que los rayos del radar están generalmente polarizados horizontalmente para recibir el máximo retorno.
Si se decide enviar simultáneamente dos pulsos con polarización ortogonal: vertical y horizontal, recibiéndose dos sets de datos proporcionales a los dos ejes de las gotas que son independientes[11]
-
- La diferencia entre las intensidades es llamada Zdr e informa sobre la forma del blanco.
- Las ondas electromagnéticas cambian de fase mientras pasan a través de material más denso, el diferencial de fase con la distancia o el diferencial de fase específica (Kdp) puede usarse para estimar la cantidad de precipitación en el volumen escaneado de la atmósfera: la tasa de lluvia. Medida no afectada por atenuación.
- La relación Zdr debería ser estable con las gotas de la misma forma, y el retorno desde un grupo de gotículas de diferentes formas o un mix de gotas, copos de nieve, piedras, etc… continuamente cambiando de posición, dando un Zdr que cambia con el tiempo. Esta variación (ρhv) dará una idea de la variedad de formas en el volumen escaneado.
Con esta nueva adquisición de conocimiento, los datos de reflectividad y de Doppler, los investigadores han trabajado en desarrollar algoritmos para diferenciar los tipos de precipitación, blancos no meteorológicos, mejor acumulación de estimadores, etc… NCAR ha sido uno de los líderes en este campo, con Dusan S. Zrnic y Alexandre V. Ryzhkov.
NOAA tiene operando un "test base" para sus radares operacionales desde 2000, y planea equiparlos a sus equipos de 1 dm NEXRAD con polarización hacia el fin de la década.
La en:McGill University J.S. Marshall con su Observatorio Radar en Montreal, Canadá, ha convertido su instrumento, en 1999, y sus datos usados operacionalmente por en:Environment Canadá en Montreal. Otro EC radar en King City (norte de Toronto) ha sido polarizado en 2005, trabajando en una longitud de onda de 5 cm que da nuevos desafíos. EC espera generalizar esta conversión a toda su red. Finalmente, Météo de Francia trabaja en este aspecto y tendrá sus primeros radares polarizados en 2008.
Para más detalles:Desarrollo de la polarización en EE.UU.
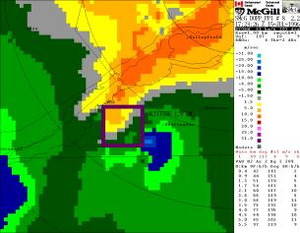
McGill University operational output
Tipos principales de "salidas" del radar
Todos los datos de escaneo del radar se representan de acuerdo a la necesidad del usuario. Diferentes salidas se han desarrollado a través del tiempo para alcanzar esto. Aquí lista de salidas disponibles comunes y especializadas.
Indicador de Plan de Posición
Ver : Indicador del Plan de Posición, en inglés
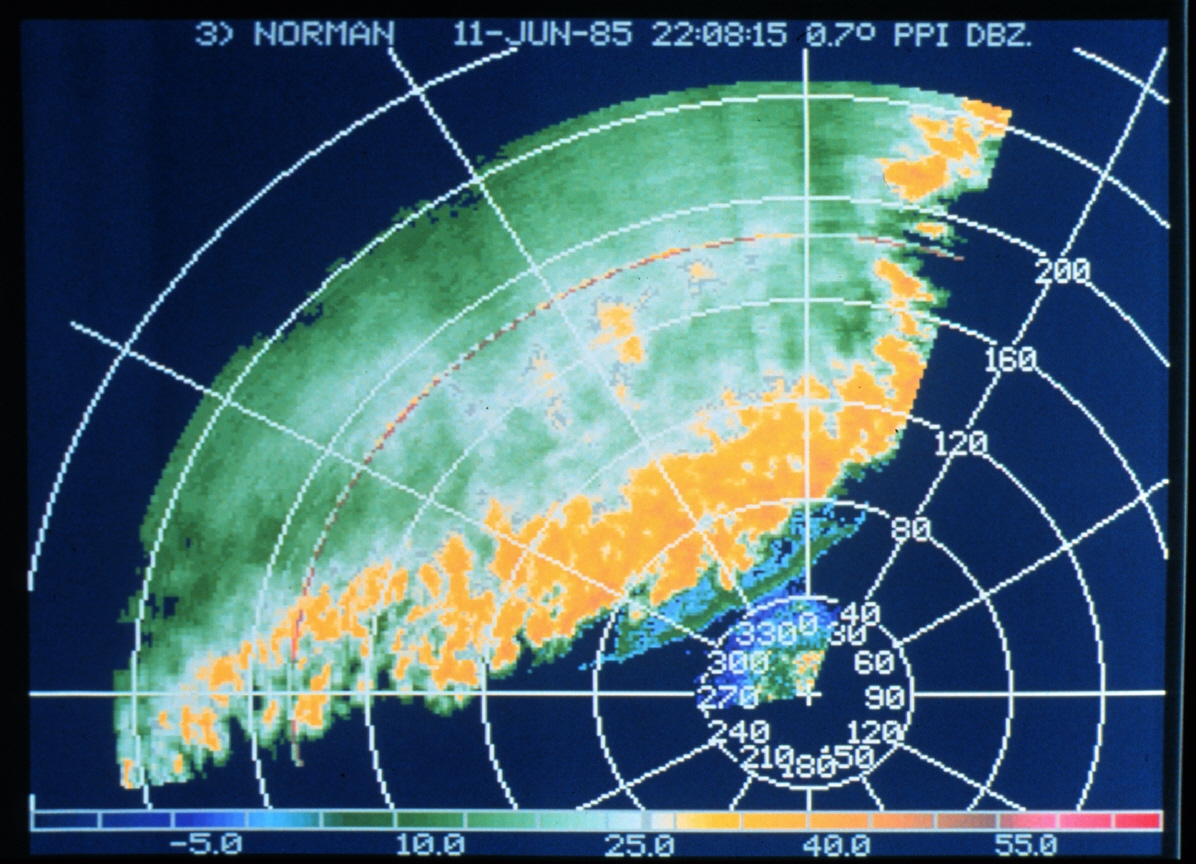
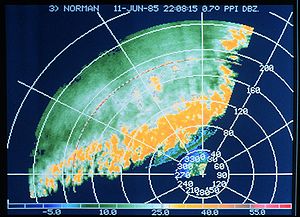 Frente de tormenta apreciada en reflectividad (dBZ) en un PPI del NOAA
Frente de tormenta apreciada en reflectividad (dBZ) en un PPI del NOAAA medida que los datos se obtienen de a un ángulo por un tiempo, el primer modo de desplegarlos es con el "Indicador del Plan de Posición, PPI", que solo produce una imagen bidimensional del retorno radárico. Debe recordarse que los datos (retornos) vienen de diferentes distancias al radar, a diferentes alturas arriba del terreno.
Esto es muy importante cuando una lluvia de alta intensidad, cerca del radar, está relativamente junto al suelo, pero en cambio otra a 160 km de distancia estará cerca de 1,5 km arriba del terreno, y tener diferentes cantidades de agua alcanzando el suelo. Así es dificultoso comparar los ecos de la tormenta a diferentes distancias del radar.
A los PPI se les agregan ecos del terreno cerca del radar, como un problema suplementario. Y podrían ser malinterpretados como ecos reales. Por lo que otros productos y más tratamientos de datos se han desarrollado para evitar estos inconvenientes.
Uso: en datos de reflectividad, Doppler y polarimétricos se puede usar PPI.
N.B.: en el caso de datos Doppler, son posibles dos puntos de vista: relativos a la superficie o a la tormenta. Cuando se mira la cinética general de una lluvia para extraer el viento a diferentes altitudes, es mejor usar datos relativos al radar. Pero cuando se los ve para rotaciones del viento bajo una tormenta, es mejor usar imágenes relativas de tormentas que sustraen el movimiento general de la precipitación, para observar solo el movimiento del aire dentro de la nube. Aquí hay un ejemplo en tiempo real: NWS Burlington radar, se puede comparar los productos BASE y STORM Doppler
Indicador de Plan de Posición de Altitud Constante
Ver: Indicador de Plan de Posición de Altitudes Constantes
Para evitar algunos de los problemas en PPI, el CAPPI o "Indicador de Posición del Plan de Altitud Constante" se ha desarrollado por investigadores de Canadá. Es básicamente un cruce horizontal de datos radar. Así, uno puede comparar la precipitación en iguales metrajes a diferentes distancias del radar, evitando ecos del terreno. Aunque los datos se capturan a una cierta altura por encima del suelo, se debe inferir una relación entre los reportes de las estaciones terrenas y los datos radar.
CAPPI llama a un gran número de ángulos desde cerca del horizonte a cerca de la vertical del radar en orden a tener un corte que sea tan cerrado como sea posible a todas las distancias de la altura necesaria. Pero aún luego, después de ciertas distancias, no hay ningún ángulo disponible y el CAPPI se hace PPI de los más bajos ángulos. La línea en zigzag de los ángulos en el diagrama arriba muestra que los datos usados producen alturas CAPPI de 1,5 y 4 km. Téngase en cuenta que la sección después de 120 km se hace usando los mismos datos.
USO: mayormente para datos de reflectividad. La universidad McGill produce "Doppler CAPPI", pero la naturaleza de la velocidad hace una salida algo con "ruido", ya que las velocidades pueden cambiar rápidamente en dirección con la altura, en contrario con el patrón bastante suave, en reflectividad.
Ejemplos en tiempo real:
Composición vertical
Otra solución a los problemas PPI es producir imágenes de máxima reflectividad en la capar arriba del terreno. Esta solución es usualmente tomada cuando el número de ángulos disponibles es pequeño o variable. El Servicio Nacional del Tiempo está usando tales Composites como su esquema de escaneo, pudiendo variar de 4 a 14 ángulos, de acuerdo a su necesidad, formando muy bastos CAPPI. El Composite asegura que ningún eco fuerte se pierda en la capa, y un tratamiento usando velocidades Doppler elimina los ecos de tierra.
Ejemplo de tiempo real: NWS Burlington radar, se puede comparar los productos BASE y COMPOSITE
Acumulaciones
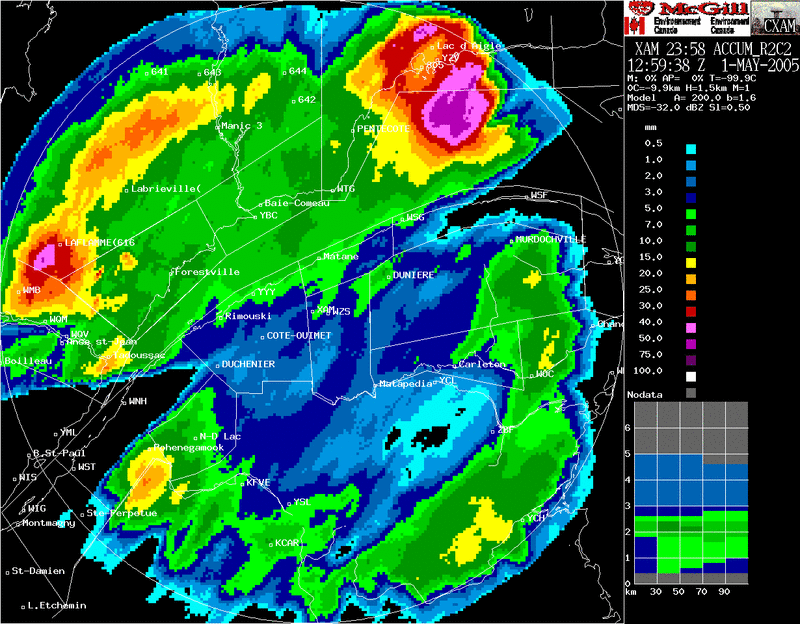
 Acumulación de lluvias de 24 h, radar Val d'Irène, este de Canadá. Las zonas sin datos en el este y sudoeste son por bloqueo del rayo radárico por montañas. (Fuente: Environment Canadá)
Acumulación de lluvias de 24 h, radar Val d'Irène, este de Canadá. Las zonas sin datos en el este y sudoeste son por bloqueo del rayo radárico por montañas. (Fuente: Environment Canadá)Uno de los principales usos del radar es mostrar la cantidad de precipitaciones caídas sobre una gran cuenca para propósitos de hidrológicos. Por ej., control de inundaciones ribereñas, manejo de cloacas; construcción de embalses son áreas donde los planificadores necesitan datos acumulados. Idealmente completa los datos de las estaciones de superficie que se pueden usar para calibración.
Para producir acumulaciones de radar, se debe estimar la tasa de lluvia sobre un punto por los valores promedio sobre tal punto entre un PPI, o CAPPI, y el siguiente; luego se multiplica por el tiempo entre esas imágenes. Si uno desea para más largos periodos de tiempo, puede adicionarse todas las acumulaciones de imágenes durante tal tiempo.
Topes de ecos
La aviación es el usuario más importante de datos de radar. Una carta particularmente importante en ese campo son los "Topes de Eco" para planear vuelos y evitar tiempo peligroso. Muchos "radares meteo" escanean suficientes ángulos para tener sets en 3D de datos en el área de cobertura. Así se tienen las máximas alturas donde se pueden producir precipitación en ese volumen. Sin embargo, debe recordarse que las máximas alturas alcanzables por el haz del radar no son los topes de nubes, pudiéndose extender más allá del alcance.
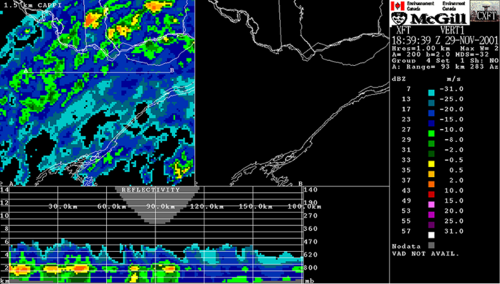
Secciones eficaces verticales
Para conocer la estrucura vertical de nubes, en particular de tormentas o el nivel de la capa de fusión, el producto secciones eficaces verticales de los datos radárico está disponible para meteorólogos.
Redes radáricas
En las pasadas pocas décadas, las redes de radar se han estado extendiendo al punto de componer vistas cubriendo grandes áreas. Por ej., EE.UU., Canadá, países europeos, Japón, etc. producen imágenes globales de cada país, en sus radares. Y esto no es una simple trivia.
Tal clase de red consiste de diferentes tipos de radar, con sus propias características de ancho de haz, longitud de onda, calibraciones. Todo a tener en cuenta cuando se ajustan los datos de bordes entre radares de la red. ¿Qué datos usar cuando dos radares cubren el mismo punto con su "indicador de Plan de Posición, PPI"? Si se usa el eco más fuerte pero que venga del radar más distante, se están usando los retornos que vienen de más altas altitudes desde lluvia o nieve que puede evaporarse antes de alcanzar el terreno (virga). Si se usan los datos del más cercano radar, puede atenuarse el paso a través de una tormenta. Las imágenes compuestas de precipitaciones usando una red de radares se hacen con todas esas limitaciones en mente.
Algunas de las redes nacionales de radar:
- Environment Canadá (en francés)(en inglés)
- National Weather Service in United States
- República Checa
- República de Sudáfrica
- Deutscher Wetterdienst, Alemania
Algoritmos automáticos
 El cuadrado en esta imagen Doppler ha sido colocado automáticamente por el programa del radar para fijar la posición de un mesociclón. Es notable de mencionar que el cambio en la dirección del viento es menor a 10 km en diámetro (fuente: en:Environment Canada)
El cuadrado en esta imagen Doppler ha sido colocado automáticamente por el programa del radar para fijar la posición de un mesociclón. Es notable de mencionar que el cambio en la dirección del viento es menor a 10 km en diámetro (fuente: en:Environment Canada)Para ayudar al meteorólogo a señalar tiempo peligroso, se han introducido algoritmos a los programas de tratamiento de radares meteo. Ellos son particularmente importantes en el análisis de datos de velocidad Doppler, que son muy complejos. Los datos de polarización también necesitan más algoritmos.
Principales algoritmos de reflectividad:[7]
- VIL o líquido verticalmente integrado: es la masa total de precipitación en las nubes.
- Potencial ráfaga de viento, que estima los vientos bajo una nube en caso de una baja, usando el VIL y la altura de los Echotopos.
- Algoritmo del granizo estimador de su presencia y tamaño potencial.
Algoritmos principales para velocidades Doppler:[7]
- Detección de un mesociclón
- Cizalladura del viento en bajos niveles.
- TVS o Algoritmo de Firma del Vórtex de Tornado (Tornado Vortex Signature Algorithm) esencialmente un mesociclón con una gran velocidad interna encontrado a través de muchos ángulos de escaneo. Este algoritmo es usado en la Red NEXRAD para indicar la posibilidad de una formación de tornado.
- VAD o Análisis de Velocidad y Display: estima dirección y velocidad de ecos con la técnica explicada en la sección de Doppler.
- VAD y Perfil de Vinto (VWP), agrega más precisión al VAD.
Animaciones
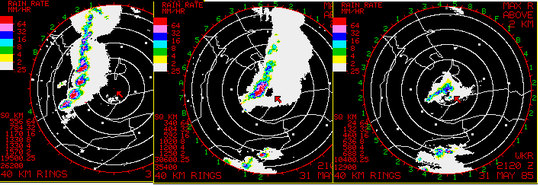
 Rizo de reflectividad PPI (en dBZ) mostrando la evolución de un huracán (NOAA)
Rizo de reflectividad PPI (en dBZ) mostrando la evolución de un huracán (NOAA)- Los productos de radar se animan mostrando la evolución de la reflectividad y los patrones de velocidad. El usuario puede extraer informaciones de la cinética de los fenómenos meteorológicos: extrapolar el movimiento, el desarrollo o la disipación. Y también muestra artefactos no meteorológicos (falsos ecos) en los ecos de radar que se discuten más adelante.
Limitaciones y defectos
La interpretación de los datos de radar depende de muchas hipótesis acerca de la atmósfera y de los blancos meteo. Éstas son:[12]
- International Standard Atmosphere.
- Blanco pequeño que aún obedezca la dispersión de Rayleigh, de tal modo que su retorno sea proporcional a su tasa de precipitación.
- El volumen escaneado por el haz sea blanco meteorológico (lluvia, pedrada, nieve, etc..), todos en la misma variedad y en una uniforme concentración.
- No atenuación (absorción electromagnética)
- No amplificación
- El retorno de los lóbulos laterales del haz sean imperceptibles.
- El haz se cierra a una curva de función de Gauss de potencia decreciente de mitad a mitad del ancho.
- Las ondas de venida y de ida estén ambas polarizadas similarmente.
- No hay retorno de reflexiones múltiples.
Uno debe tener en mente que aquellas hipótesis no son necesariamente justas en muchas circunstancias, y ser capaz de reconocer los falsos ecos de los verdaderos.
Propagación anómala (atmósfera no estándar)
El primer supuesto es que el haz radárico se mueve a través del aire, que se enfría a una cierta tasa con la altura. La posición de los ecos dependen pesadamente de esta hipótesis. Sin embargo, la atmósfera verdadera puede variar grandemente de la norma.
Super refracción
Es muy común la formación de inversiones de temperaturas cerca del suelo, por ej. aire enfriándose por la noche mientras permanece caluroso arriba. Con el índice de refracción del aire incrementado, el haz de radar se curva hacia la Tierra en vez de continuar recto. Eventualmente, tocará el terreno y se retroreflejará hacia el radar. El programa de procesado hará uso de ese "falso eco" como si viniera de una altura y distancia que no existen en condiciones normales:.[12]
Este tipo de falso retorno es relativamente fácil de señalar en un rizo de tiempo si se debe a enfriamiento nocturno o inversión marina, al ver muy fuertes ecos desarrollándose sobre un área, abriéndose en tamaño lateralmente pero sin moverse ni variar grandemente en intensidad. Sin embargo, la inversión de temperatura existe adelant de un frente cálido y la propagación de anormales ecos se mezclan con datos de ecos de lluvia.
El extremo de este problema es cuando la inversión es muy fuerte y poco profunda, y el haz de radar refleja mucho tiempo sobre el terreno como siguiendo un camino de guía de ondas. Esto va a crear múltiples bandas de ecos fuertes en las imágenes del radar.
Baja refracción
Si el aire es inestable y se enfría más rápido que la atmósfera estándar con la altura, el haz finaliza más alto que lo esperado. Esto pone a la precipitación a mayor altitud que lo realment sucedido. Esta situación es muy difícil de procesar.
Blancos invisibles (blancos no Rayleigh)
Si se desea estimar la tasa de precipitación, los blancos deben ser 10 veces menores que la onda radárica de acuerdo a la dispersión de Rayleigh.[7] Esto se debe a que la molécula de agua tiene que excitarse por la onda de radar para dar un eco de retorno. Esto es relativamente cierto para lluvia o nieve con radares de 5 o 10 cm.
Sin embargo, para muy grandes hidrometeoros, con la longitud de onda es del orden de una piedra, el nivel de retorno en trayectoria horizontal, va de acuerdo a la (Teoría de Mie, con la solución a las ecuaciones de Maxwell). Entonces, un retorno de más de 55 dBZ es casi seguro viene de granizo, pero no varía proporcionalmente con el tamaño. Y por otro lado, muy pequeños blancos como gotitas de agua de nubes son demasado diminutas para ser excitadas y no dan un registro de retorno en los radares meteo usuales.
Volumen escaneado parcialmente lleno y Resolución
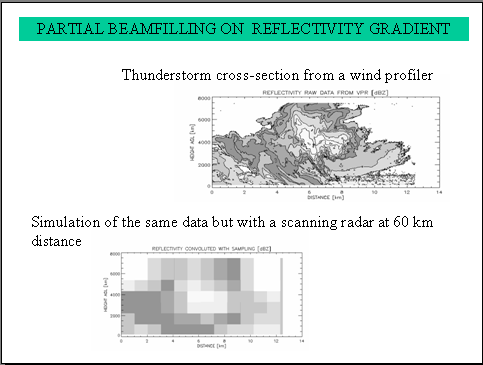
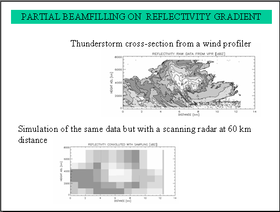 Perfiles de alta resolución de una tormenta (arriba) y de un radar meteo (abajo)
Perfiles de alta resolución de una tormenta (arriba) y de un radar meteo (abajo)El haz del radar tiene una dimensión física y los datos se muestrean a cada grado, no continuamente, a lo largo de cada ángulo de elevación.[12] Esto resulta en un promedio de los valores de los returnos para reflectividad, velocidades y datos de polarización en la resolución del volumen escaneado.
En la figura de la izq., al tope hay una vista de una tormenta tomada por un perfilador de viento cuando pasaba encima. Esto es como una sección eficaz vertical a través de la nube con una resolución vertical de 150 m y de 30 m horizontal. Se puede ver que la reflectividad ha tenido grandes variaciones en una corta distancia. Ahora compare esto con una vista simulada de qué vería un radar regular a 60 km a principio. Todo sería borroneado.
Esto muestra cómo la salida de un radar meteo es solo una aproximación a la realidad. Naturalmente, la resolución puede mejorarse con equipo más complejo, pero hay cosas que no pueden. Como se mencionó previamente, el volumen escaneado se incrementa con la distancia tal que es posiblemente que el rayo sea solo parcialmente llenado por incremento también. Esto lidera la subestimación de la tasa de precipitación a grandes distances y confunde al operador en la creencia que la lluvia es más leve que la real.
Geometría del haz
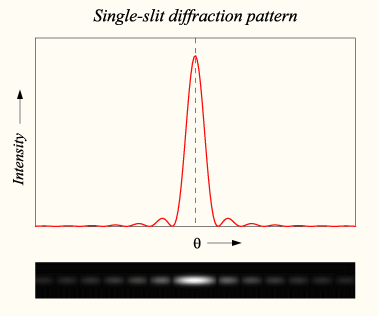
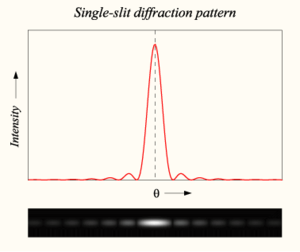 Distribución de energía idealizada de un haz de radar(Lóbulo central a 0 y el secundario a cada ladoe)
Distribución de energía idealizada de un haz de radar(Lóbulo central a 0 y el secundario a cada ladoe)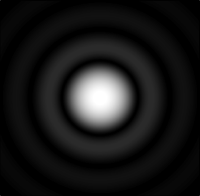 Difracción de una hendidura circular simulando la energía vista de los blancos meteorológicos
Difracción de una hendidura circular simulando la energía vista de los blancos meteorológicosEl rayo radárico no es como el de un láser, pero tiene una distribución de energía similar a los patrones de difracción de la luz pasando a través de una ranura.[7] Esto s debe al hecho de que la onda es transmitida en la antena parabólica a través de una ranura en la "guía de ondas" en el punto focal. Mucha de la energía está en el centro del haz y decrece a lo largo de una curva cerrada de función gausiana en cada lado, como se mencionó antes. Sin embargo, hay picos secundarios de emisión que muestrearán los blancos en otros ángulos desde el centro. Todo puede minimizarse bajando o quitando potencia enviada a esos lóbulos, pero nunca son cero.
Cuando un lóbulo secundario toca un blanco muy reflectante, como una montaña o una fuerte tormenta, alguna de la energía es devuelta al radar. Esta energía es relativamente débil pero arriba al mismo tiempo que el pico central, iluminando a un acimut diferente. El eco es luego desplazado por el programa de procesado. Esto tiene el efecto de ensanchar el eco meteo real haciendo un falseamiento de esos valores débiles a cada lado. Esto causa al usuario a sobreestimar la extensión real de los ecos.[12]
 Ecos fuertes de retorno del punto central del radar con una serie de colinas (amarillos y rojos pixels). Los ecos más débiles en cada lado de ellos son lóbulos secundarios (azul y verde)
Ecos fuertes de retorno del punto central del radar con una serie de colinas (amarillos y rojos pixels). Los ecos más débiles en cada lado de ellos son lóbulos secundarios (azul y verde)Blancos no meteorológicos
En el cielo hay más que lluvia, nieve y viento. Otros objectos pueden ser malinterpretados como lluvia por el radar meteo. Los principales falsos ecos meteo son:[12]
- Aves, especialmente en sus periodos de migraciones.
- Insectos a bajas altitudes.
- Partículas finas de metal tiradas por aeronaves militares para engañar al radar enemigo.
- Obstáculos sólidos como montañas, edificaciones, aeronaves.
- Tierra y mar confusas.
Cada uno de ellos tiene sus propias características que hacen posible distinguirlos al ojo entrenado, pero se puede fallar. Es posible eliminar algunos de ellos con un posttratamiento de datos usando reflectividad, Doppler y datos de polarización.
Parques eólicos
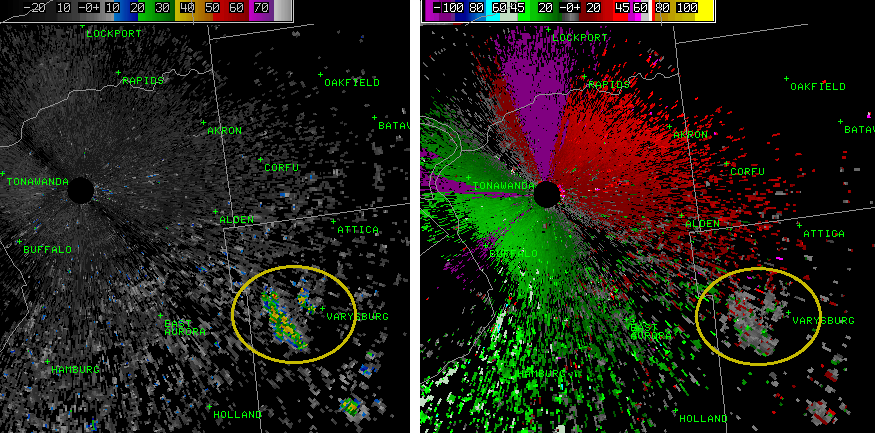
 Reflectividad (izq.) y velocidades radiales (der.) del sudeste desde un radar NEXRAD. Los ecos en círculos son de un parque eólico.
Reflectividad (izq.) y velocidades radiales (der.) del sudeste desde un radar NEXRAD. Los ecos en círculos son de un parque eólico.Las hélices rotativas de un molino de viento de los parques eólicos pueden hacer retornar los haces de radar si están en su camino. Mientras las hojas se siguen moviendo, los ecos tendrán una velocidad dada y confundir por real precipitación.[13] A más cercanía del parque eólico al radar, más importante son esos artefactos en las señales combinadas. Si las condiciones son las adecuadas, el radar puede inclusive ver falsas velocidades generando falsos positivos para el algoritmo de firma de vórtex de tornado del radar meteo, como ocurrió en 2009 en Dodge City, Kansas.[14]
Finalmente, las aspas de los molinos pueden bloquear una parte del haz radárico, produciendo atenuaciones en los retornos de las precipaciones, subestimándolas.
Atenuación
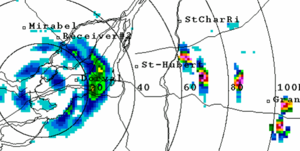
 Ejemplo de fuerte atenuación cuando un frente de tormentas se mueve sobre (de imágenes de izq. a der.) con un radar meteo de 5 cm de longitud de onda (flecha roja). Fuente: en:Environment Canada
Ejemplo de fuerte atenuación cuando un frente de tormentas se mueve sobre (de imágenes de izq. a der.) con un radar meteo de 5 cm de longitud de onda (flecha roja). Fuente: en:Environment CanadaLas microondas usadas en los radares meteo pueden ser absorbidas por lluvia, depende de la longitud de onda usada. Para los radares de 1 dm, esta atenuación es despreciable.[7] Esta es la razón d porqué países con tormentas de alta cantidad de agua usann longitudes de onda de 1 dm como en EE.UU. con el NEXRAD. El costo de una antena mayor, usar klystron y otros equipos más complejos se paga por los beneficios.
Para un radar de 5 cm, la absorción comienza a ser importante en lluvia muy pesada, y esa atenuación empujar a subestimar ecos en y debajo de una fuerte línea de tormentas.[7] Canadá y otros países norteños usan esa clase de radares menos costosos, ya que sus precipitaciones usualmente son de menor intensidad. Sin embargo, sus operadores deben tener siempre presente y recordar este efecto al interpretar los datos. Las imágenes de arriba muestran como una fuerte línea de ecos parecen desvanecerse al moverse sobre el radar. Para compensar esa conducta, el sitio del radar se elige para intentar cubrir desde diferentes puntos de vista una misma tormenta.
Longitudes de onda cada vez más cortas están cada vez más atenuadas y serían solo útiles a radares de cortos rangos.[7] En EE. UU. hay estaciones de televisión con radares de 3 cm cubriendo el área de su audiencia (quizás inferior a 100 km. Conociendo sus limitaciones, se usan acopladas a la NEXRAD local, pudiendo añadir información al meteorólogo.
Bandas de brillo
 CAPPI a 1,5 km de altitud al tope con fuerte contaminación de las bandas brillosas (del amarillo). El corte vertical al comienzo muestran que este fuerte retorno es solo tierra (Fuente: en:Environment Canada)
CAPPI a 1,5 km de altitud al tope con fuerte contaminación de las bandas brillosas (del amarillo). El corte vertical al comienzo muestran que este fuerte retorno es solo tierra (Fuente: en:Environment Canada)Como vimos previamente, la reflectividad depende del diámetro del blanco y su capacidad de reflejar. Los copos de nieve son grandes pero pobremente reflectantes, mientras las gotas de lluvia son pequeñas pero altamente reflectantes.
Cuando la nieve cae a través de una capa encima del punto de congelación, funde y eventualmente pasa a lluvia. Usando la ecuación de reflectividad, se puede demostrar que los retornos desde la nieve antes de fundirse y de la lluvia después, no son tan diferentes como el cambio en la constante dieléctrica compensado con el cambio en tamaño. Sin embargo, durante el proceso de fusión, la onda del radar “ve” algo parecido a muy grandes gotas como los copos de nieve pasando recibiertas con agua.
Esto da retornos mejorados que pueden perderse por precipitaciones más fuertes. En un PPI, esto mostrará un intenso anillo de precipitaciones a la altitud donde el haz cruza el nivel de fusión, mientras en una serie de CAPPIs, solo los cerca de tal nivel serán más fuertes ecos. Una buena manera de confirmar una banda brillante es hacer una sección eficaz vertical a través de los datos como en el dibujo arriba.
Reflexiones múltiples
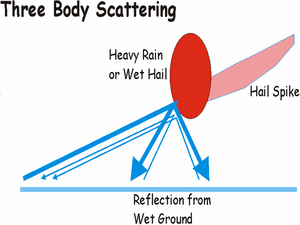
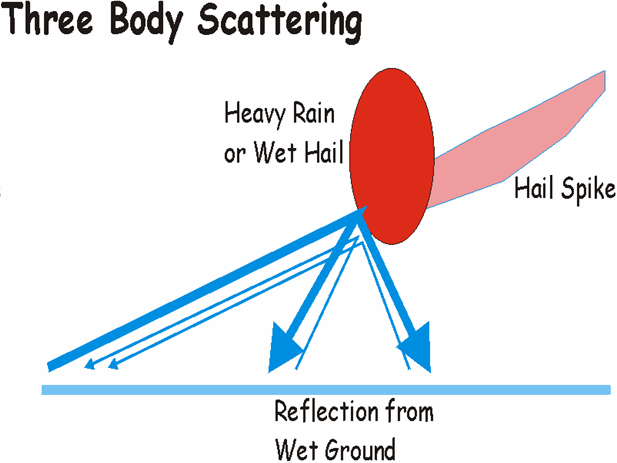
Se asume que el haz alcanza los blancos meteo y retorna directamente al radar. De facto, hay energía reemitida en todas las direcciones. Mucho de eso son reflexiones débiles y múltiples, disminuyendo y pudiendo eventualmente retornar al radar de tal evento es negligible. En algunos casos, esto no puede darse.[7]
Por ejemplo, cuando el haz hace contacto con granizo, la energía difundida hacia el suelo mojado, será retroreflejado hacia el granizo y luego vuelta al radar. El eco resultante es débil pero reconocible. Debido al camino extra hecho para ir, llega y arriba tarde a la antena, y es colocado más tarde que otros ecos de la fuente. Esto da una clase de triángulo de reflectividades más débiles y falsas, radialmente debajo del granizo.[12]
Soluciones de hoy y en el futuro
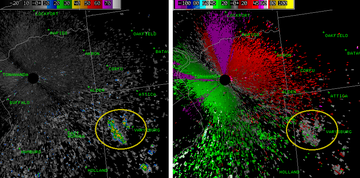
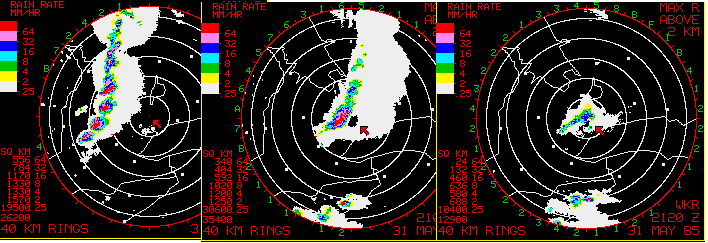
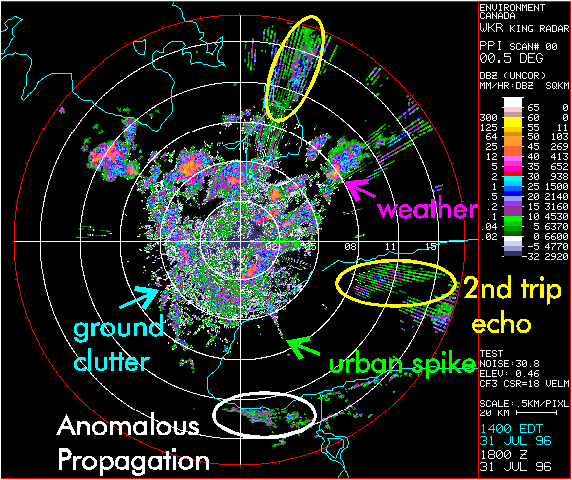
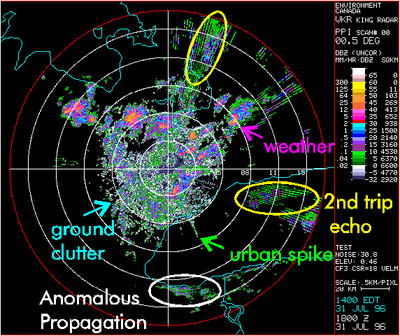 Imagen de radar de reflectividad con muchos ecos no meteo (Fuente: en:Environment Canada).
Imagen de radar de reflectividad con muchos ecos no meteo (Fuente: en:Environment Canada).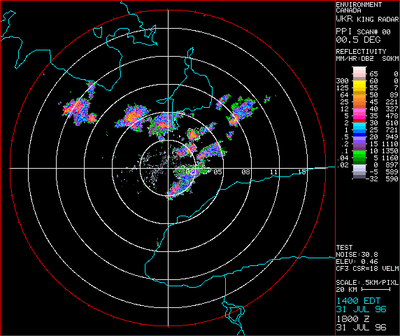 La misma imagen pero limpiada con velocidades Doppler. (en:Environment Canada)
La misma imagen pero limpiada con velocidades Doppler. (en:Environment Canada)Estas dos imágenes muestran que pueden mejorarse, en limpieza, los datos de radar. La salida a izq. está hecha con los retornos brutos y es difícil de señalar las condiciones meteorológicas. Mientras usualmente nubes de lluvia y de nieve se mueven, uno puede usar las velocidades Doppler para eliminar buena parte de la confusión (ecos de suelo, reflejos de construcciones, propagaciones anómalas, etc.) La imagen a la derecha muestra ya filtrada usando las propiedades en modo técnico complejo.
Sin embargo, no todos los blancos no meteorológicos se mantienen aún, pensar en aves por ejemplo. Otras, como las bandas brillantes, dependen de la estructura de las precipitaciones. La polarización ofrece tipos directos de ecos que podrían usarse para filtrar más datos falsos o producir imágenes separadas para propósitos especializados. Este reciente desarrollo en este campo es proclive a mejorar la calidad de la salida de datos del radar.
Otra cuestión es la resolución. Como se mencionó previamente, los datos del radar son un promedio del columen escaneado por el haz. La resolución puede mejorarse con antenas más grandes o mayor densidad de la red. Un programa del Centro de Sensoramiento Colaborativo Adaptivo de la Atmósfera (CASA) [15] ayuda a suplementar los radares regulares NEXRAD usando bandas más baratas de 3 cm "banda X", en torres de telefonía celular. Así estos radares subdividirán grandes áreas de NEXRAD en dominios más pequeños para mirar a altitudes más bajas en sus ángulos más pequeños. Y darán detalles no disponibles en este momento.
La "línea del tiempo" es otro punto a mejorar. Tardando 5-10 min para un escaneado completo, muchas cosas pueden perderse sobre el desarrollo de una tormenta. Se testean radares de fase radar de fase, en inglés en el Lab Nacional de Tormentas Severas, en inglés en Norman, Oklahoma, para acelerar la adquisición de datos.
Características del "radar meteo" en el INTA Pergamino, Pergamino, provincia de Buenos Aires, Argentina
- Marca y modelo: Gematronik Rainbow
- Antena reflectora parabólica de 42 dm de diámetro, y de 33 m de altura[16]
- Ganancia de la antena 38,6 dBi
- Polarización linear
- Aceleración angular 15º/s²
- Ancho del haz 1º (a 2,8 GHz)
- Elevación -2º a 90º (límite operacional)
- Velocidad angular 36º/s (6 rpm)
- Duración del pulso 1 us (pulso corto) a 2 us (pulso largo)
- Frecuencia de repetición 250 - 400 Hz (2 u/s) a 400 - 1200 Hz (1 u/s)
- Secuecia de repetición 250 a 1.200 pulsos/s
- Frecuencia de transmisión Banda S (2,7 a 2,9 GHz), monofrecuencia, sintonizable
- Potencia máxima 850 kW
- Potencia estándar 250 kW
- Mínima señal detectable - 114 dBm
- Tipo de procesamiento reflectividad, velocidad Doppler y largo espectral
- Modo de operación local o remota
- Distancia no ambigua 400 km
- Velocidad no ambigua ± 50 m/s a 120 km
Bajo funcionamiento normal la antena gira 360 grados en azimut (horizontal) con una elevación cercana a los 0 grados, luego se apunta unos pocos grados más por encima del horizonte y se efectúa una nueva serie de rotaciones, se va elevando el ángulo de elevación por pasos de algunos grados hasta llegar hasta unos 45 grados de elevación. Durante todo este tiempo se emiten pulsos de radio y se reciben sus ecos cuya intensidad y otras características se van almacenando en una computadora para su procesamiento.
Una vez completada la serie de giros a distintos ángulos de elevación, el radar cuenta con una gran cantidad de datos numéricos que caracterizan un volumen tridimensional con centro en la antena, siendo el radio de este volumen de unos 240 km y la altura aumenta a medida que se aleja del radar. No se tienen datos de ecos ubicados directamente encima del radar ni de los puntos muy cercanos al mismo, porque se necesita un tiempo mínimo entre la emisión y su eco par que la detección sea posible. Todo el sistema de antena y mecanismos que mueven la antena están ubicados dentro de un radomo (alojamiento esférico), de material transparente a la radiofrecuencia para protección de la intemperie. Los equipos de transmisión, recepción y procesamiento de los datos están ubicados en la casilla ubicada inmediatamente debajo del radomo. Todo el sistema se ubica sobre una torre metálica de 33 m de altura. Este radar adquiere los datos de la intensidad de los ecos, y mide por efecto Doppler, la velocidad radial de los mismos, por el desplazamiento de frecuencia del reflejo como resultado del movimiento del objeto. Esta capacidad permite, además de proveer información sobre los vientos a distintas alturas, discriminar los ecos producidos por objetos terrestres (estáticos) que se cancelan para que no aparezcan en la imagen final.
Características del "radar meteo" en Sâo José dos Campos, San Pablo, Brasil
- Antena reflectora parabólica de 4 m de diámetro
- Ganancia de la antena 38,6 dBi
- Polarización linear
- Aceleración angular 15º/s²
- Ancho del haz 2,1º (a 2,8 GHz)
- Elevación -2º a 90º (límite operacional)
- Velocidad angular 36º/s (6 rpm)
- Duración del pulso 1 us (pulso corto) a 2 us (pulso largo)
- Frecuencia de repetición 250 - 400 Hz (2 u/s) a 400 - 1200 Hz (1 u/s)
- Frecuencia de transmisión Banda S (2,7 a 2,9 GHz), monofrecuencia, sintonizable
- Potencia máxima 850 kW
- Mínima señal detectable - 114 dBm
- Tipo de procesamiento reflectividad, velocidad Doppler y largo espectral
- Modo de operación local o remota
- Distancia no ambigua 400 km
- Velocidad no ambigua ± 50 m/s a 120 km http://www.labmet.univap.br/radar/rcarac.htm
Aplicaciones especializadas
Radar meteo en la aviónica
Las aplicaciones aéreas de los sistemas de radar incluye radar meteo, evitado de colisiones, enganche de blancos, proximidad a tierra, y otros sistemas. El ARINC 708 sistema de radar meteo comercial, es un sistema de radar meteo, primario que usa un radar de pulso Doppler.
Enlaces internos
- Radar de apertura sintética
- Alerta meteorológico
Fuente
Traducción de Wikipedia anglés Weather radar (versión: 2006-07-26)
Original texto de francés Radar météorologique (versión: 2006-07-16)
- ↑ David Atlas, "El Radar en Meteorología", editor Sociedad Americana de Meteorología
- ↑ «Stormy Weather Group». McGill University ((2000)). Consultado el 2006-05-21.
- ↑ «The First Tornadic Hook Echo Weather Radar Observations». Colorado State University ((2008)). Consultado el 30 enero 2008.
- ↑ «The King City Operational Doppler Radar: Development, All-Season Applications and Forecasting (PDF)». Canadian Meteorological and Oceanographic Society (1990). Consultado el 2006-05-24.
- ↑ «Information about Canadian radar network». The National Radar Program. Environment Canada (2002). Consultado el 2006-06-14.
- ↑ «The PANTHERE project and the evolution of the French operational radar network and products: Rain estimation, Doppler winds, and dual polarization». Météo-France. 32nd Radar Conferencia de la AMS, Albuquerque, NM (2005). Consultado el 24 de junio 2006.
- ↑ a b c d e f g h i j k l m n ñ Doviak, R. J.; D. S. Zrnic (1993). Radar Doppler y Observaciones del Tiempo, 2ª ed. edición, San Diego California: Academic Press.
- ↑ (en inglés)«Pulse volume». Glossary of Meteorology. American Meteorological Society (2009). Consultado el 27 de septiembre 2009.
- ↑ Skolnik, Merrill I.. «equation%20radar&f=false 1.2», Radar handbook, 3 edición, McGraw-Hill. 9780071485470. ISBN 0071485473. Consultado el 22. «27 de septiembre 2009»
- ↑ Yau, M K; R. R. Rogers. Short Course in Cloud Physics, Third Edition edición, Butterworth-Heinemann.
- ↑ Carey, Larry (2003). «Lecture on Polarimetric Radar». Texas A&M University. Consultado el 2006-05-21.
- ↑ a b c d e f «Errores comunes en interpretación de radar». en:Environment Canada. Consultado el 23 de junio de 2007.
- ↑ NWS Office in Buffalo, NY (8 de junio 2009). «Wind Farm Interference Showing Up on Doppler Radar». NOAA. Consultado el 1 de septiembre 2009.
- ↑ Dirk Lammers (Associated Press) (29 de agosto 2009). «Wind farms can appear sinister to weather forecasters». Houston Chronicle. Consultado el 1 de septiembre 2009.
- ↑ «List of lectures on CASA». en:American Meteorological Society ((2005)). Consultado el 21 de mayo 2006.
- ↑ INTA - Pergamino - Actualidad - Radar meteorológico de Pergamino
Bibliografía
- Atlas, David. 1990. Radar en Meteorology: Battan y la Conferencia 40ª Aniversario del Radar Meteorológico, editor American Meteorological Society, Boston, 806 pp., ISBN 0-933876-86-6, AMS Code RADMET.
- Blanchard, Yves. 2004. Le radar, 1904-2004: histoire d'un siècle d'innovations techniques et opérationnelles , editor Ellipses, París, Francia, ISBN 2-7298-1802-2
- Bringi, VN; V Chandrasekar. 2001. Polarimetric Doppler Weather Radar, publicó Cambridge University Press, New York, EE.UU. ISBN 0-521-01955-9
- Doviak, RJ; DS Zrnic 1993. Doppler Radar and Weather Observations, Academic Press. Seconde Edition, San Diego Cal., p. 562.
- Gunn, KLS; TWR East. 1954. Las propiedades de microondas de las partículas de precipitación. Quart. J. Royal Meteorological Society, 80, pp. 522–545.
- Yau, MK; RR Rogers. 1989. Curso Corto en Física de Nubes, 3ª Edición, editor Butterworth-Heinemann, 1 de enero de 1989, 304 p. EAN 9780750632157 ISBN 0-7506-3215-1
- Wakimoto, Roger M; Ramesh Srivastava. 2003. Radar y Ciencia Atmosférica: una Colección de Ensayos en Honor de David Atlas, editor American Meteorological Society, Boston, agosto de 2003. Series: Meteorological Monograph, Vol 30, Nº 52, 270 p. ISBN 1-878220-57-8; AMS Code MM52.
Enlaces externos
 Wikimedia Commons alberga contenido multimedia sobre Radar meteorológico.Commons
Wikimedia Commons alberga contenido multimedia sobre Radar meteorológico.Commons- Proyecto Europeo OPERA -links a todos los radares meteo del mundo
- RainRadar - Radares meteorológicos del mundo
- (en francés)(en inglés) Radares Meteo Environment Canadá
- (en francés)(en inglés) Errores en interpretar radar, Environment Canadá
- Sitio de radares doppler de EE.UU.
- (en francés)(en inglés) Curso corto de radar meteo para maestros, Environment Canadá
- (en francés)(en inglés) Radar meteo Canadá FAQ
- Desarrollo de los Radares Meteo en EE.UU., los primeros 40 años del en:National Severe Storms Laboratory
- (en francés)(en inglés) McGill Sitio de radar
- NEXRAD Red de radares Doppler radar
- Radares Polarimétricos
- Sitio de radares NOAA
- Info NOAA
- NOAA Investigación sobre radares
- Información del Tiempo con radar
Categorías: Radares | Instrumentos de medición meteorológicos



![P_r = \left [P_t{{ G^2 \lambda^2 \sigma^0}\over{{(4\pi)}^3 R^4}} \right] \propto \frac {\sigma^0} {R^4}](/pictures/eswiki/57/979640a3c5c11ec42d405a4030c296df.png)

![\begin{cases} V\quad= escaneado\ volumen \\ \qquad= pulso\ longitud\ \ X\ haz\ ancho \\ \qquad= \left[\frac {c\tau}{2} \right] \left[\frac {\pi R^2 \theta^2}{4} \right] \end{cases}](/pictures/eswiki/50/27b1e6880c852a68709a13528b6dd533.png)
![P_r = \left [P_t{{ G^2 \lambda^2 }\over{{(4\pi)}^3 R^4}} \right] \left[\frac {c\tau}{2} \right] \left[\frac {\pi R^2 \theta^2}{4} \right] \eta = \left [P_t \tau G^2 \lambda^2 \theta^2 \right] \left[\frac {c}{512(\pi^2)} \right] \frac {\eta} {R^2}](/pictures/eswiki/99/c3ea80a743ca1aeefa44eb018d43d2aa.png)










Wikimedia foundation. 2010.