- Unidad de medición inercial
-
Véase también: Sistema de navegación inercial
Una unidad de medición inercial o IMU (del inglés inertial measurement unit), es un dispositivo electrónico que mide e informa acerca de la velocidad, orientación y fuerzas gravitacionales de un aparato, usando una combinación de acelerómetros y giróscopos. Las unidades de medición inercial son normalmente usadas para maniobrar aviones, incluyendo vehículos aéreos no tripulados, entre muchos otros usos, y además naves espaciales, incluyendo transbordadores, satélites y aterrizadores. Recientes desarrollos han permitido la producción de dispositivos GPS protegidos contra la interferencia electromagnética.[1]
La IMU es el componente principal de los sistemas de navegación inercial usados en aviones, naves espaciales, buques y misiles guiados entre otros. En este uso, los datos recolectados por los sensores de una IMU permiten a un computador seguir la posición del aparato, usando un método conocido como navegación por estima.
Contenido
Cómo trabajan
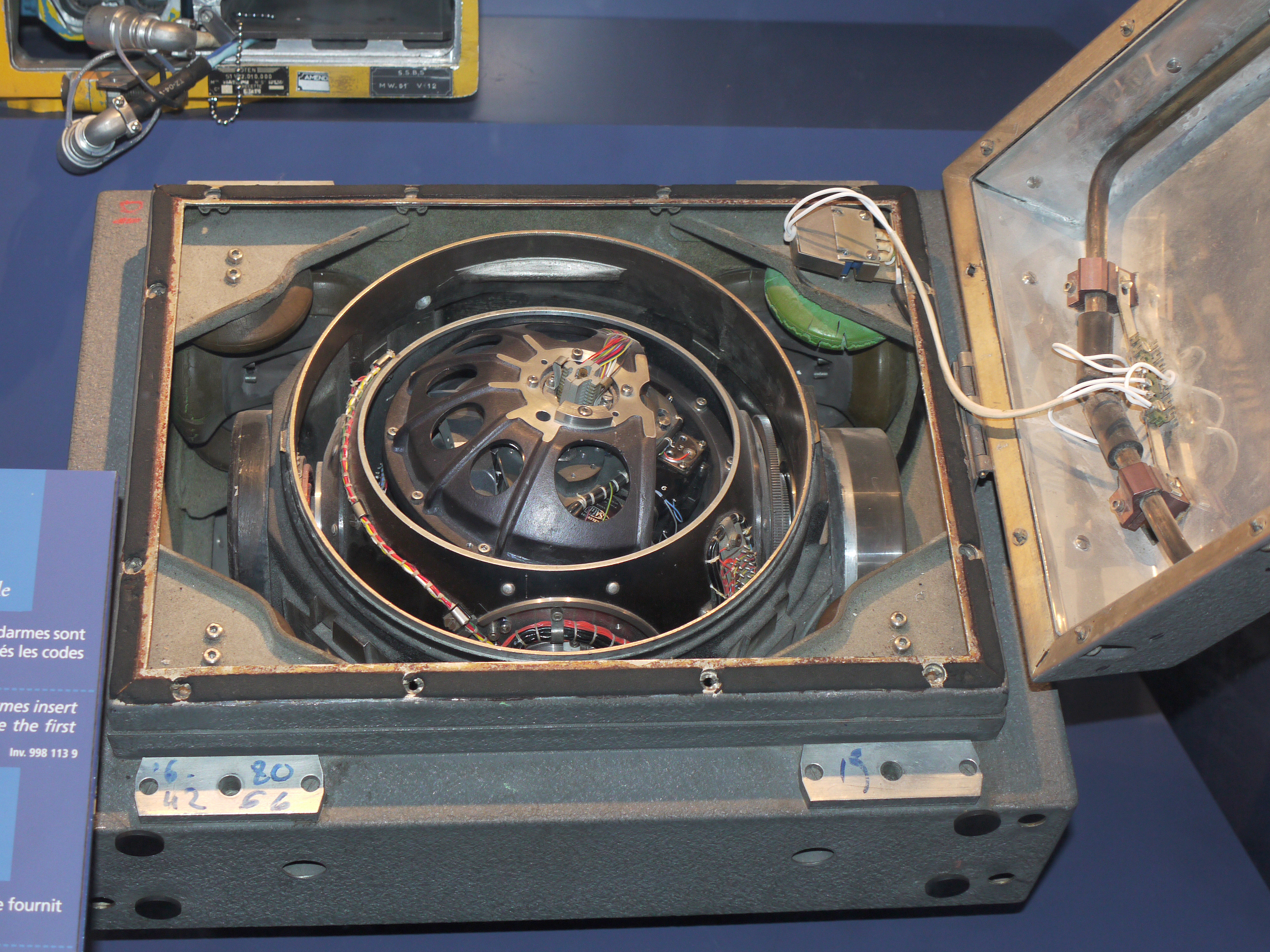
 Unidad de navegación inercial del IRBM S3 francés.
Unidad de navegación inercial del IRBM S3 francés.
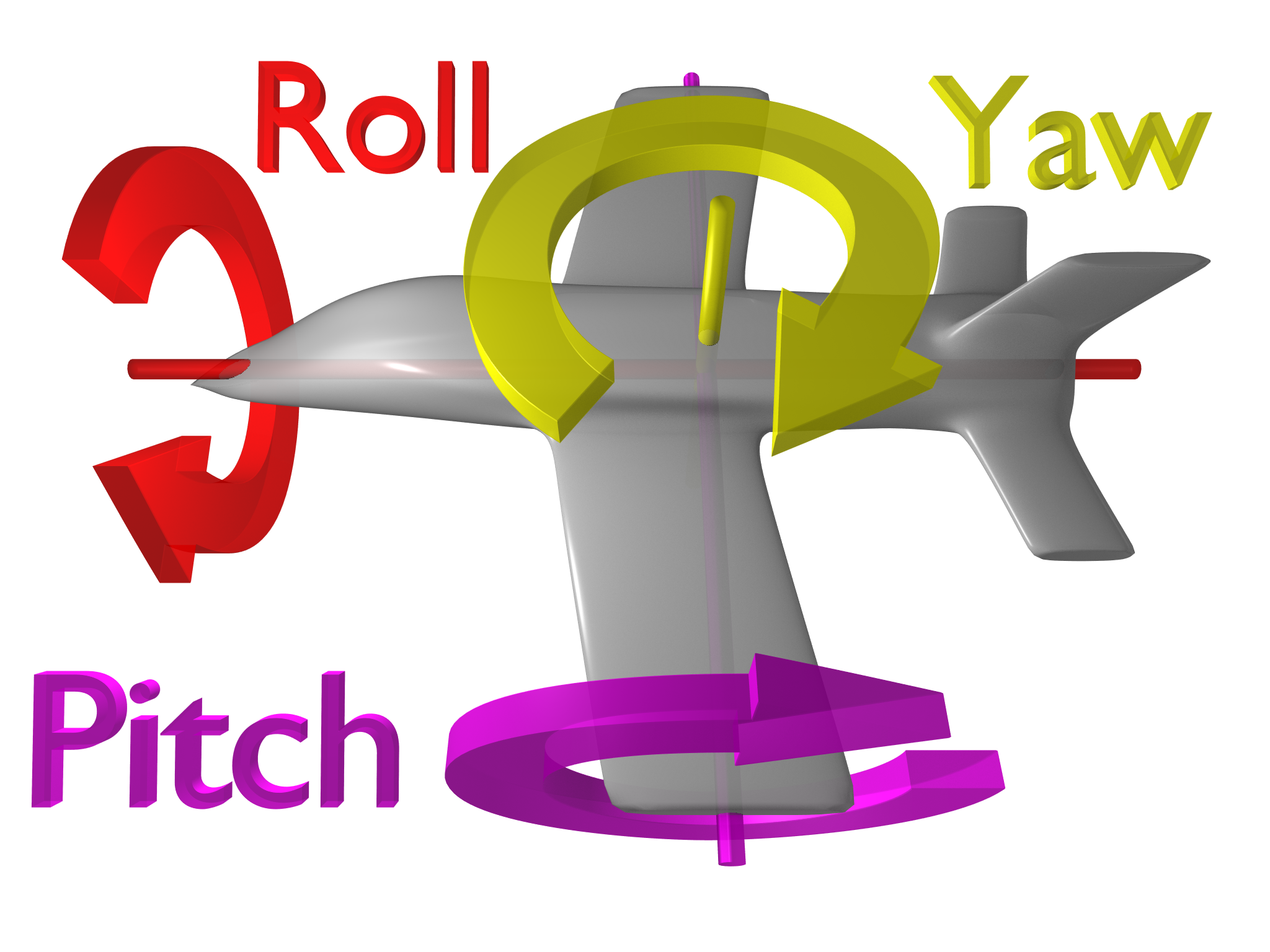
 Una unidad de medición inercial funciona, en parte, detectando los cambios en el cabeceo (pitch), el alabeo (roll) y la guiñada (yaw).
Una unidad de medición inercial funciona, en parte, detectando los cambios en el cabeceo (pitch), el alabeo (roll) y la guiñada (yaw).Una IMU funciona detectando la actual tasa de aceleración usando uno o más acelerómetros, y detecta los cambios en atributos rotacionales tales como cabeceo, alabeo y guiñada usando uno o más giróscopos.
En un sistema de navegación, los datos informados por la IMU son alimentados en un computador, el que calcula su posición actual basado en la velocidad, direcciones viajadas y tiempo.
Por ejemplo, si una IMU instalada en un aeroplano informará que el aparato viajó hacia el oeste por una hora a una velocidad promedio de 804 kilómetros por hora, el computador de guiado podría deducir que el avión debería estar a 804 kilómetros al oeste de su posición inicial. Si estuviera combinada con un sistema computarizada de mapas, el sistema de guía podría usar este método para mostrar al piloto donde está localizado geográficamente el avión, de propósito similar al sistema de navegación GPS — pero sin la necesidad de comunicarse con componentes externos, tales como satélites. Este método de navegación es llamado navegación por estima.
Desventajas
Una de las grandes desventajas de usar IMU para la navegación es que estas normalmente son afectadas por un error acumulativo, incluyendo el error Abbe. Debido a que el sistema de guía está continuamente agregando los cambios detectados a las posiciones previamente calculadas (véase navegación por estima), cualquier error en la medición, no importando lo pequeña que sea, se van acumulando de punto a punto. Esto lleva a una 'deriva', o a una diferencia que aumenta siempre entre donde el sistema piensa que se encuentra localizado y la posición real.
Por ejemplo, si a un individuo le fueran vendados los ojos, y luego fuera movido en una serie de direcciones, y luego se le preguntara donde él piensa que se encuentra, él sólo sería capaz de estimar su posición final. Mientras más fuera movida una persona mientras se encuentra vendada, más inexacta será su estimación de donde se encuentra finalmente. Las IMU trabajan de una manera similar a como los seres humanos detectan el movimiento, y aunque ellas son considerablemente más exactas que los seres humanos para detectar el movimiento, están lejos de ser perfectas y sus errores se acumulan de forma similar.
Las IMU normalmente son sólo uno de los componentes de un sistema de navegación. Otros sistemas son usados para corregir las imprecisiones que las IMU sufren invariablemente, tales como GPS, sensores de gravedad (para la vertical local), sensores de velocidad externos (para compensar la deriva por velocidad), un sistema barométrico para la corrección de la altitud y un compás magnético.
Construcción
El término IMU es usado ampliamente para referirse a una caja que contiene tres acelerómetros y tres giróscopos. Los acelerómetros está colocados de tal forma que sus ejes de medición son ortogonales entre sí. Ellos miden la aceleración inercial, también conocida como fuerzas G.
Los tres giróscopos están colocados en un patrón ortogonal similar, midiendo la posición rotacional en referencia a un sistema de coordenadas seleccionada en forma arbitraria.
Usos
Las unidades de medición inercial son usadas en sistemas de guía inercial instaladas en vehículos. Actualmente casi todas las naves de superficie, comerciales o militares poseen una. La mayor parte de los aviones también están equipados con IMU.
Las IMU también son usadas como en naves aéreas y espaciales, con el propósito de informar las medidas inerciales a un piloto (ya sea que él este en la cabina o piloteando por control remoto). Ellas son críticas durante las misiones espaciales para poder maniobrar aterrizadores y otros aparatos estén tripulados o no.
Las IMU pueden, además de propósitos navegacionales, servir como sensores de orientación en el campo del movimiento de los humanos. Ellas son usadas frecuentemente en tecnología para captura de movimiento. Una IMU está en el corazón de la tecnología de equilibrio del Segway.
Referencias
Enlaces externos
- Descripción de una ayuda IMU para el Roll isolated Gyro (en inglés)
- Navegación Inercial: 40 años de evolución - Resumen en www.imar-navigation.de (en inglés)
- Una IMU de tres ejes (en inglés)
- Este artículo fue creado a partir de la traducción del artículo Inertial measurement unit de la Wikipedia en inglés, concretamente de esta versión, bajo licencia Creative Commons Atribución Compartir Igual 3.0 y GFDL.
Categoría:- Instrumentos de navegación aérea
Wikimedia foundation. 2010.