- Sistema CBTC
-
 CBTC en Metro de Madrid, España
CBTC en Metro de Madrid, España![Tren CBTC en [Metro de Shenzhen] Línea 3, China](/pictures/eswiki/50/240px-Shenzhenmetro_cityflo650.jpg) Tren CBTC en [Metro de Shenzhen] Línea 3, ChinaCada vez mayor número de operadores de metro se inclinan por sistemas de señalización CBTC basadas en comunicación vía radio (en la imagen dos ejemplos de líneas equipadas con la solución CBTC de Bombardier, CITYFLO 650)
Tren CBTC en [Metro de Shenzhen] Línea 3, ChinaCada vez mayor número de operadores de metro se inclinan por sistemas de señalización CBTC basadas en comunicación vía radio (en la imagen dos ejemplos de líneas equipadas con la solución CBTC de Bombardier, CITYFLO 650)Un sistema CBTC (por sus siglas del inglés Communications-Based Train Control), en español sistema de Control de Trenes Basado en Comunicaciones, es un sistema de control y señalización ferroviaria que hace uso de comunicaciones bidireccionales entre el equipamiento del tren y el equipamiento en la vía para gestionar el tráfico. De esta forma, la posición exacta de un tren en una línea es conocida con mayor precisión que en los sistemas de control tradicionales y, con ello, dicha gestión del tráfico ferroviario se lleva a cabo de una forma más eficiente y segura.
Formalmente, podríamos definir un sistema CBTC como un “sistema de control automático y continuo del tren, que utiliza determinación en alta resolución de la ubicación de un tren independiente de circuitos de vía; que está basado en la comunicación continua y de alta capacidad de datos entre el tren y la vía; y con procesadores tanto en el tren como en la vía capaces de implementar funcionalidades de protección (Automatic Train Protection, ATP), y opcionalmente funcionalidades de control (Automatic Train Operation, ATO) y supervisión (Automatic Train Supervision, ATS)”,[1] tal y como se especifica en el estándar IEEE 1474. Al conjunto de ATP, ATO y ATS se le llama comúnmente ATC (Automatic Train Control)
Contenido
Antecedentes
A medida que las ciudades y su población crecen y a la par que aumenta el uso de los sistemas de transporte metropolitanos, los sistemas de control ferroviario tienen que adaptarse a una demanda creciente de servicios cada vez más rápidos y más eficientes.[2] Para responder a esta situación, los operadores buscan la optimización de la capacidad de transporte en las líneas que gestionan así como el control de sus costes de explotación.
Aumentar la capacidad de transporte, reduciendo los intervalos entre trenes en las líneas ferroviarias se ha convertido, por tanto, en el principal objetivo de los sistemas CBTC. Mediante este tipo de sistemas de señalización se consigue reducir al mínimo, pero siempre garantizando la seguridad de la circulación, la distancia que separa los trenes entre sí mientras operan.
Los sistemas tradicionales de control se han basado históricamente en la detección de la presencia de un tren en una sección discreta de la vía (denominada cantón ferroviario). Cada cantón es protegido por señales que impiden la entrada de otros trenes cuando dicho cantón se encuentra "ocupado" por otro tren. Dado que cada cantón es fijo una vez construida la infraestructura, estos sistemas se conocen como sistemas de cantón fijo o bloqueo fijo.[3]
Al contrario que ocurre con los sistemas de cantón fijo, la zona protegida en torno a cada tren en los sistemas CBTC modernos no está definida de forma estática por la infraestructura (excepto en los sistemas de cantón virtual, con apariencia operativa de cantón móvil pero limitados por la existencia de cantones fijos). Estos sistemas son conocidos como sistemas de cantón móvil o bloqueo móvil y en ellos los trenes actualizan continuamente su posición exacta y la transmiten a los equipos de campo mediante un sistema de comunicación bidireccional vía radio.
Origen
Con la llegada de las comunicaciones digitales por radio a principios de los 90, el mundo de la señalización ferroviaria a ambos lados del atlántico comenzó a experimentar empleando la radio como una forma viable de comunicación entre el tren y el equipamiento de vía.[4] Esto se debía principalmente a su mayor ancho de banda y a su potencial eficiencia en costes, más reducidos que el de la solución existente en aquel momento mediante lazos inductivos. De esta manera empezó la evolución hacia los ahora conocidos como sistemas CBTC vía radio.
 Infraestructura del SFO AirTrain, equipada con un sistema CBTC en el aeropuerto de San Francisco
Infraestructura del SFO AirTrain, equipada con un sistema CBTC en el aeropuerto de San Francisco
Como resultado, Bombardier inauguró a principios de 2003 el primer sistema CBTC basado en radio del mundo en el Automated People Mover (APM) del Aeropuerto Internacional de San Francisco.[5] Unos meses más tarde, a mediados del mismo año, fue Alstom quien introdujo su primer sistema CBTC basado en comunicación vía radio en la North East MRT Line de Singapur.[6]
Los sistemas CBTC modernos basados en radio tienen su más cercano antepasado en los sistemas basados en transmisión y desarrollados por Alcatel SEL (hoy Thales) para los ART de Bombardier en Canadá a mediados de los 80.[7] Este tipo de tecnología, dada a conocer también como TBTC (Transmission-Based Train Control), hacía uso de determinadas técnicas de transmisión de datos por lazos inductivos, operando en el rango de frecuencias de 30 a 60 kHz, para establecer la comunicación entre los trenes y el equipamiento de vía. Esta tecnología convenció a muchos operadores de Metro y fue, por aquella época, ampliamente extendida a pesar de algunos problemas de compatibilidad electromagnética y del alto coste de instalación y mantenimiento de los lazos de transmisión.[8]
Por simplicidad, y teniendo en cuenta las últimas tendencias y los requisitos que en la actualidad piden los operadores de metro a los sistemas CBTC,[9] aquí únicamente se tratan sistemas CBTC con comunicación vía radio y basados en el principio de cantón móvil (sea este cantón móvil puro o cantón virtual). De la misma forma no todos los sistemas basados en comunicación vía radio pueden ser considerados como sistemas CBTC (principalmente por su dependencia de métodos tradicionales de detección del tren),[1] y así se ha tenido en cuenta también en este artículo.
Sin embargo es también cierto que, en sus comienzos, el sistema de comunicación vía radio conllevó también algunos problemas debido sobre todo a aspectos relacionados con la compatibilidad e interoperabilidad, tal y como muestran antiguas noticias de aquella época.[10] La fiabilidad de esta tecnología de comunicación es clave a la hora de poner en marcha un sistema CBTC, y la tecnología en su aplicación ferroviaria ha tardado en madurar creando varios inconvenientes durante la implantación y también incluso durante la operación comercial en algunos entornos. De hecho, aún se continua avanzado y la fiabilidad en los sistemas de comunicación vía radio ha mejorado considerablemente desde entonces, a la par que los costes se siguen optimizando.
Características de los sistemas CBTC modernos
Concepto de CBTC y cantón móvil
Este tipo de sistemas se emplea fundamentalmente en líneas de metro (ligero o pesado) o APM, pero se puede implantar incluso en líneas de cercanías. Podíamos decir que su equivalente en ferrocarriles de largo recorrido sería el Nivel 3 de la normativa ERTMS, que no ha sido aún llevado a la práctica.[11]
En los sistemas CBTC modernos son los trenes los que comunican su estado (vía radio) a los dispositivos distribuidos a lo largo de la vía (conocido como equipamiento de vía). Este estado incluye, entre otros, parámetros como su posición exacta, velocidad, sentido de marcha o distancia de frenado. Esto permite, por tanto, calcular la zona potencialmente ocupada por el tren durante su marcha. Con esta información, el equipamiento de vía puede calcular los puntos que no deben ser sobrepasados por los trenes que circulen por la misma vía. Estos puntos son entonces comunicados para que los trenes ajusten de forma automática y continua su velocidad, a la vez que circulan con total seguridad. Es decir, los trenes reciben constantemente información de su distancia respecto al tren precedente y pueden ajustar su distancia de seguridad en consecuencia.
 Distancia de seguridad entre trenes en sistemas de cantón fijo y sistemas de cantón móvil
Distancia de seguridad entre trenes en sistemas de cantón fijo y sistemas de cantón móvilEn el primero de los diagramas se aprecia que, para el sistema de señalización, la ocupación del primer tren incluye por completo aquellos cantones sobre los que se encuentra (Occupancy). Esto es debido a que es imposible para el sistema conocer con precisión en qué parte exacta de los cantones ocupados se encuentra realmente el vehículo. El sistema permitirá al segundo tren moverse únicamente hasta la frontera del último cantón libre (la curva de frenado aparece en azul).
En el sistema de cantón móvil, la posición del tren en la línea y su curva de frenado que varía con su velocidad es calculada de forma continua por éste y transmitida al equipamiento de vía. De esta forma, dicho equipamiento de vía puede establecer una autoridad de movimiento (es decir, una zona protegida para el paso del tren), o MA por las siglas del inglés Movement Authority que, en este ejemplo, alcanza la cola del tren precedente.
Es importante destacar que la ocupación calculada para los trenes en este tipo de sistemas debe incorporar un margen de seguridad (que se muestra en la figura en amarillo), y que se incluye a su vez en la “huella” del tren en la vía (footprint). Dicho margen de seguridad es dependiente de la precisión de medida de los dispositivos del tren (sistema de odometría).
Los sistemas CBTC de cantón móvil permiten, por tanto, reducir la distancia de seguridad a respetar entre trenes consecutivos. Esta varía de forma continua con la posición actualizada de los trenes y con su velocidad de circulación, garantizando al mismo tiempo la seguridad en la misma. De este modo se consigue reducir el intervalo de tiempo entre trenes consecutivos (headway) y, en consecuencia, aumentar la capacidad de transporte.
Grado de automatización
Los sistemas CBTC modernos permiten diferentes grados de automatización (Grade of Automation, GoA), según se define en la norma IEC 62290-1.[12] De hecho, CBTC no es necesariamente sinónimo de “tren automático o sin conductor”, aunque suele considerarse una tecnología básica para este objetivo.
Los grados de automatización posibles permiten desde un modo de operación manual con protección, GoA 1 (empleado habitualmente como modo degradado), hasta el modo de operación completamente automático, GoA 4 (Unattended Train Operation, UTO); pasando por otros posibles modos de conducción semi-automática GoA 2 (Semi-automated Train Operation, STO) o sin conductor GoA 3 (Driverless Train Operation, DTO).[13] Este último opera sin conductor en cabina pero con la presencia de un asistente a bordo del tren para hacer frente a situaciones degradadas y guiar a los pasajeros en emergencias. A mayor nivel de automatización, mayores niveles de seguridad, funcionalidad y rendimiento se hacen necesarios.[13]
Principales usos
 APM sin conductor (driverless) equipado con CBTC basado en radio en el aeropuerto de Dallas-Fort Worth
APM sin conductor (driverless) equipado con CBTC basado en radio en el aeropuerto de Dallas-Fort WorthPor sus características, los sistemas CBTC permiten optimizar el uso de la infraestructura ferroviaria y alcanzar una alta capacidad de transporte y un bajo intervalo de tiempo entre trenes, a la vez que los hacen compatibles con una operación segura. Su empleo es factible tanto en nuevas líneas de metro de alta demanda como superpuesto en líneas ya existentes con objeto de mejorar su capacidad de transporte.[14]
En el caso de líneas ya existentes la situación es significativamente más sensible. Esto es principalmente debido al reto que supone no interrumpir la operación comercial durante la implantación. Con todo, ya existen casos de implantación de sistemas CBTC basados en comunicación vía radio y principio de cantón móvil sobre una línea existente sin haber causado afección al pasajero o interrupción del tráfico.[15] Esto incluye la instalación de equipos tanto en vía como en el material rodante, ya sea este último igualmente existente o nuevo.
Ventajas y beneficios
La evolución en diversos campos de la tecnología así como la experiencia obtenida durante los últimos 30 años en la operación ferroviaria convierten a los sistemas CBTC modernos en más fiables, haciéndolos por tanto mucho menos propensos al fallo que los sistemas tradicionales. Normalmente, los sistemas CBTC necesitan de menos material instalado en la vía a la vez que sus herramientas de diagnóstico y monitorización son más avanzadas, haciéndolos por tanto más fáciles de implantar y, lo que es más importante, menos costosos de mantener.[13]
Además, a medida que los sistemas CBTC se desarrollan y van haciendo cada vez mayor uso de las últimas tecnologías y componentes, son capaces de ofrecer arquitecturas más simples y compactas. Un claro ejemplo es la alta disponibilidad que ofrecen estos sistemas, consiguiendo así que determinados fallos no afecten en absoluto a la operación.
Por otro lado, los sistemas de señalización CBTC ofrecen una alta flexibilidad en lo que a términos operacionales se refiere, permitiendo a los operadores responder a las demandas de tráfico específicas de cada ciudad de una forma cómoda y eficiente. En realidad, la operación automática puede conseguir una mejora significativa en términos de capacidad de transporte comparada con los sistemas de conducción manual tradicionales.[16] [17]
Adicionalmente cabe mencionar que, dada su naturaleza, resultan más eficientes energéticamente que los sistemas tradicionales de control de tráfico ferroviario.[13] Para ello se incorporan de forma habitual nuevas funcionalidades, como el uso de diferentes estrategias automáticas de conducción o la mejor adaptación de la oferta de transporte a la demanda de viajeros, las cuales permiten significativos ahorros energéticos.
Arquitectura
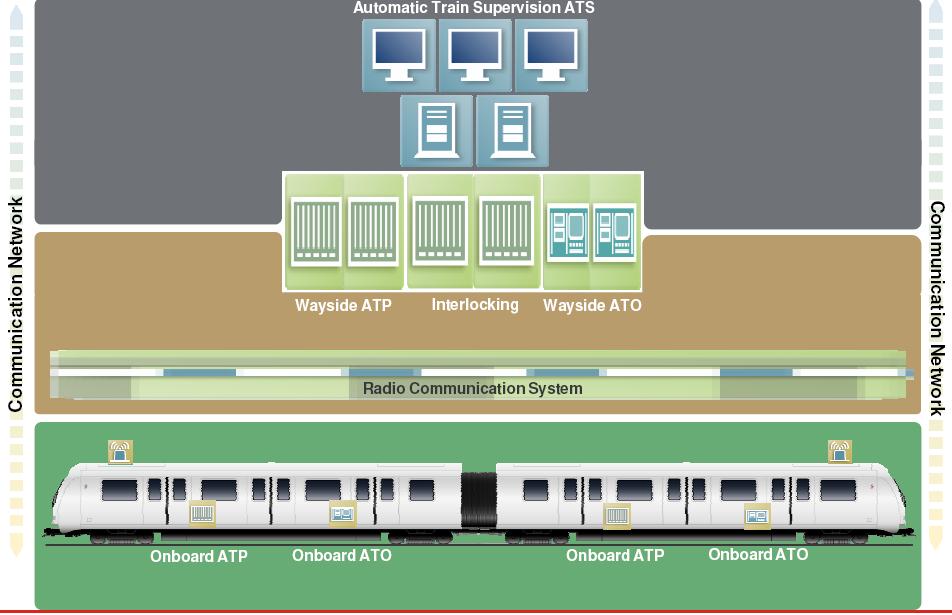
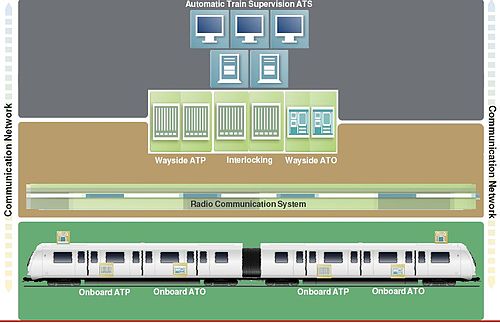 Arquitectura típica de un sistema CBTC basado en radio. La solución técnica a emplear puede variar de un proveedor a otro.
Arquitectura típica de un sistema CBTC basado en radio. La solución técnica a emplear puede variar de un proveedor a otro.La arquitectura típica de un sistema CBTC moderno incluye los siguientes subsistemas fundamentales:
 Equipamiento de vía en un sistema CBTC
Equipamiento de vía en un sistema CBTC-
- Equipamiento de vía, que incluye a su vez el sistema de enclavamiento y los Controladores de Zona en las que se puede dividir una línea o red (y que normalmente incluyen las funcionalidades ATP y ATO de vía). Dependiendo de la solución técnica de cada proveedor, la arquitectura puede ser centralizada o distribuida. El control del sistema se realiza desde un puesto de mando central ATS y, en ocasiones, se pueden incluir también equipos de control local distribuidos como modo de respaldo.
- Equipamiento CBTC embarcado, que integra las funcionalidades ATP y ATO.
- Comunicación Tren-Vía, basado en la actualidad en sistemas de comunicaciones vía radio.
Aunque depende de la solución técnica de cada proveedor, de forma lógica se pueden distinguir los siguientes componentes principales dentro de la arquitectura típica de un sistema CBTC:
-
-
- Sistema ATP embarcado. Es el encargado de controlar en todo momento la velocidad del tren para mantenerla dentro de un perfil de operación seguro, forzando la aplicación del freno en caso necesario. En los sistemas CBTC se encarga también de la comunicación con el sistema ATP de vía para la transmisión de los datos del tren (como velocidad y distancia de frenado) y recepción de sus límites de alcance (o puntos de parada), calculados por la infraestructura para que la operación sea segura.
-
-
-
- Sistema ATO embarcado. Se encarga de controlar automáticamente la petición del esfuerzo de tracción o frenado del tren con objeto de regular su velocidad por debajo del límite fijado por el sistema ATP. Su cometido fundamental es facilitar la tarea del conductor o asistente (u operar sin conductor en el caso que se requiera) asegurando los objetivos de regulación del tráfico y el confort del pasajero. Permite además escoger diferentes estrategias de marcha para, por ejemplo, reducir al mínimo el tiempo de trayecto o incluso reducir el consumo de energía.
-
-
-
- Sistema ATP de vía. Este sistema gestiona las comunicaciones con todos los trenes en su área de influencia. Además calcula los puntos de parada que no debe sobrepasar cada tren que circula por dicho área. Su cometido es por tanto fundamental para garantizar la seguridad de la circulación.
-
-
-
- Sistema ATO de vía. Es el encargado de controlar el destino y la regulación de la operación de los trenes. Indica a cada tren su próximo destino o estación, y puede informarle de la duración de la parada. Igualmente proporciona otras funciones auxiliares, y no relacionadas con la seguridad, como órdenes de parada o salto de estación, o la gestión de alarmas y eventos.
-
 Ilustración de un centro de control con sistema ATS
Ilustración de un centro de control con sistema ATS-
-
- Sistema de Comunicaciones. Siendo un sistema basado en la comunicación bidireccional de datos entre los trenes y los equipos de vía, los sistemas CBTC modernos integran normalmente una red de radio digital mediante antenas (line-of-sight propagation) o cable radiante (leaky feeder). Es habitual el uso de la banda libre de 2,4 GHz (la misma empleada por los sistemas WiFi) aunque otras frecuencias libres como 900 MHz (USA) o 5,8 GHz, así como frecuencias sujetas a licencia, podrían ser empleadas igualmente.[18]
- Sistema ATS. El ATS tiene como principal función la de gestionar el tráfico ferroviario de acuerdo con los criterios de regulación específicos en cada sistema. Este subsistema ejerce de principal interfaz del operador con el sistema de señalización CBTC, gestionando, entre otros, el interfaz para el enrutamiento de trenes, la regulación de horarios, las alarmas y eventos, o la relación del sistema CBTC con aplicaciones externas.
-
-
-
- Sistema de Enclavamiento. Cuando es requerido como un subsistema independiente (entre otros casos, por ejemplo por la necesidad de un enclavamiento como sistema de respaldo en caso de fallo del sistema CBTC), se encarga (de forma vital) del control de los objetos de campo como las agujas, señales y otras funcionalidades relacionadas. En redes de menor complejidad, aunque existente, la funcionalidad de enclavamiento se puede integrar directamente dentro del sistema ATP de vía.
-
Principales proveedores
Actualmente, los principales proveedores mundiales de sistemas CBTC basados en radio y principio de cantón móvil son, por orden alfabético:
Aplicaciones y proyectos
Son cada vez más las aplicaciones de sistemas CBTC que se implementan (y se están implementando) alrededor del mundo, tal y como se muestra en la figura (con fecha de junio de 2011). Estas van desde implantaciones de pequeño tamaño y funcionalidad y con un número limitado de vehículos (como es el caso de los APM en los aeropuertos de San Francisco y Washington), hasta complejos sistemas superpuestos sin afectar al servicio en metros pesados existentes que transportan cientos de miles de pasajeros al día en más de 100 trenes (como las líneas 1 y 6 de Metro de Madrid, algunas líneas del Metro de París, o las 4 líneas del Sub Surface Railway -SSR- en el Metro de Londres).[19]
El tratar de resumir y referenciar todos estos casos es sin duda una ardua tarea. Sin embargo, la tabla pretende listar todos aquellos sistemas CBTC tanto en operación comercial como siendo actualmente desarrollados alrededor del mundo. En la tabla se intenta mostrar además en nivel de automatización y si el sistema CBTC fue o está siendo superpuesto sobre un sistema de señalización tradicional existente (Brownfield) o, por el contrario, implantado sobre una línea de nueva construcción (Greenfield).
A la vista de esta tabla, debemos también tener en cuenta que la tecnología basada en transmisión por lazos inductivos mencionada anteriormente (y referida en este artículo como TBTC) es cada vez menos empleada en la actualidad[8] y poco a poco tiende a caer en desuso. Esta es la razón por la que, facilitando la comprensión del lector, aquí se muestran únicamente aquellos proyectos CBTC que hacen uso de las comunicaciones vía radio y se basan en el principio de cantón móvil.
Proyectos CBTC basados en radio y cantón móvil en el mundo (radio-based and moving block principle)[note 2] [note 3] Lugar Línea/Sistema Proveedor Solución Puesta en servicio Km Núm de trenes Comentarios San Francisco Airport AirTrain APM BOMBARDIER CITYFLO 650 2003 5 38 Greenfield, UTO Singapore Metro North-East Line ALSTOM Urbalis 2003 20 25 UTO Seattle-Tacoma Airport Satellite Transit System APM BOMBARDIER CITYFLO 650 2003 3 22 Brownfield, UTO Las Vegas Monorail THALES SelTrac RF 2004 6 36 Greenfield, UTO Dallas-Fortworth Airport DFW Skylink APM BOMBARDIER CITYFLO 650 2005 10 64 Greenfield, UTO Hong Kong Disneyland Penny´s Bay Line THALES SelTrac RF 2005 3 2 Greenfield, UTO Lausanne Metro M2 ALSTOM Urbalis 2008 6 ? UTO Beijing Airport Express ALSTOM Urbalis 2008 28 10 Greenfield, UTO Beijing Metro 2 ALSTOM Urbalis 2008 23 48 Metro de Madrid 1, 6 BOMBARDIER CITYFLO 650 2008 48 124 Brownfield, STO Las Vegas-McCarran Airport McCarran Airport APM BOMBARDIER CITYFLO 650 2008 2 6 Brownfield, UTO London Heathrow Airport Heathrow APM BOMBARDIER CITYFLO 650 2008 1 9 Greenfield, UTO Metro de Barcelona 9 SIEMENS Trainguard MT CBTC 2009 46 50 Greenfield, UTO New York City Transit Canarsie Line SIEMENS Trainguard MT CBTC 2009 17 53 Brownfield, STO Washington-Dulles Airport Dulles APM THALES SelTrac RF 2009 8 29 Greenfield, UTO Shanghai Metro 6, 7, 8, 9 THALES SelTrac RF 2009 135 111 Greenfield and Brownfield Taipei Metro Neihu-Mucha BOMBARDIER CITYFLO 650 2010 15 176 Greenfield and Brownfield, UTO Philadelphia SEPTA Light Rail Green Line BOMBARDIER CITYFLO 650 2010 8 115 STO Beijing Metro 4 THALES SelTrac RF 2010 28 33 DTO Guangzhou Metro Pearl River Line APM BOMBARDIER CITYFLO 650 2010 4 14 Greenfield, DTO Guangzhou Metro 3 THALES SelTrac RF 2010 67 40 DTO London Gatwick Airport Terminal Transfer APM BOMBARDIER CITYFLO 650 2010 1 6 Brownfield, UTO Paris Metro 3, 5 ANSALDO STS / SIEMENS Inside RATP´s
Ouragan project2010 ,2013 26 40 Brownfield, STO Yongin EverLine ART BOMBARDIER CITYFLO 650 2011 19 30 UTO Shenzhen Metro 3 BOMBARDIER CITYFLO 650 2011 40 50 STO Tianjin Metro 2, 3 BOMBARDIER CITYFLO 650 2011 52 50 STO Metro de Madrid 7 Extension MetroEste INVENSYS SIRIUS 2011 9 ? Brownfield, STO Dubai Metro Red, Green THALES SelTrac RF 2011 70 85 Greenfield, UTO Seoul Metro Bundang Line THALES SelTrac RF 2011 17 12 Greenfield, DTO Shenyang Metro 1 ANSALDO STS CBTC 2011 27 23 Greenfield, STO Sacramento International Airport Sacramento APM BOMBARDIER CITYFLO 650 2011 0,5 2 Greenfield, UTO Singapore Metro Circle ALSTOM Urbalis 2012 35 40 Greenfield, UTO Metro Santiago 1 ALSTOM Urbalis 2012 20 42 Greenfield and Brownfield, STO Sao Paulo Metro 1, 2, 3 ALSTOM Urbalis 2012 57 ? Brownfield, DTO Algiers Metro 1 SIEMENS Trainguard MT CBTC 2012 9 14 Greenfield, STO Paris Metro 1 SIEMENS Trainguard MT CBTC 2012 16 49 Brownfield, DTO Phoenix Sky Harbor Airport PHX Sky Train BOMBARDIER CITYFLO 650 2012 4 9 Greenfield, UTO Riyadh KAFD Monorail BOMBARDIER CITYFLO 650 2012 4 12 Greenfield, UTO Shanghai Metro 11 THALES SelTrac RF 2012 50 58 Brownfield and Greenfield Sao Paulo Commuter Lines 8, 9, 11 INVENSYS SIRIUS 2012 107 136 Brownfield, STO Sao Paulo Metro 4 SIEMENS Trainguard MT CBTC 2013 13 14 UTO Helsinki Metro 1 SIEMENS Trainguard MT CBTC 2013 35 ? Greenfield and Brownfield, DTO Paris Metro 13 THALES SelTrac RF 2013 [20]23 ? STO Beijing Metro 8, 10 SIEMENS Trainguard MT CBTC 2013 49 82 STO Nanjing Metro 2, 10 SIEMENS Trainguard MT CBTC 2013 38 35 Greenfield Sao Paulo Metro Tiradentes Monorail Extension Line 2 BOMBARDIER CITYFLO 650 2014 24 54 Greenfield, DTO Stockholm Metro Red ANSALDO STS CBTC 2014 41 30 Brownfield, STO Jeddah Airport King Abdulaziz APM BOMBARDIER CITYFLO 650 2014 2 10 Greenfield, UTO Incheon Metro 2 THALES SelTrac RF 2014 29 37 UTO São Paulo Metro 5 BOMBARDIER CITYFLO 650 2015 20 34 Brownfield & Greenfield, UTO Taipei Metro Circular ANSALDO STS CBTC 2015 15 17 Greenfield, UTO Singapore Metro Downtown INVENSYS SIRIUS 2016 40 73 Greenfield, UTO Taichung Metro Green ALSTOM Urbalis 2017 17 36 Greenfield, UTO New York City Transit Flushing Line THALES SelTrac RF 2017 25 46 Brownfield, STO London Underground SSR Lines: Metropolitan, District, Circle, Hammersmith&City BOMBARDIER CITYFLO 650 2018 310 240 Brownfield, STO Rennes ART B SIEMENS Trainguard MT CBTC 2018 12 19 Greenfield, UTO Copenhagen Metro S-Bane SIEMENS Trainguard MT CBTC 2018 170 135 Brownfield, STO Budapest Metro M2, M4 SIEMENS Trainguard MT CBTC ? 17 41 Guangzhou Metro 4, 5 SIEMENS Trainguard MT CBTC ? 70 ? Notas y Referencias
Notas
- ↑ Únicamente aquellos sistemas basados en radio y en el principio de cantón móvil aparecen en esta imagen. Los autores agradecerán colaboración para actualizar y mantener la misma. La información contenida aquí viene de diversas fuentes y ha sido en mayor o menor medida contrastada en Wikipedia, foros públicos e incluso webs corporativas de los proveedores, con lo que los autores no pueden hacerse responsables de pequeños error que puedan existir, animando al resto de editores a colaborar en que esta información sea lo más fiable posible. Contactar por medio de Wikipedia Discussion
- ↑ Únicamente aquellos sistemas basados en radio y en el principio de cantón móvil aparecen en esta tabla. Los autores agradecerán colaboración para actualizar y mantener la misma. La información contenida aquí viene de diversas fuentes y ha sido en mayor o menor medida contrastada en Wikipedia, foros públicos e incluso webs corporativas de los proveedores, con lo que los autores no pueden hacerse responsables de pequeños error que puedan existir, animando al resto de editores a colaborar en que esta información sea lo más fiable posible.
- ↑ Some of the references come from Mr. Dominique Joubert and other CBTC Meeting Point group members in LinkedIn. Thanks a lot to them, and further collaboration is appreciated.
Referencias
- ↑ a b IEEE Standard for CBTC Performance and Functional Requirements (1474.1-1999).[1] IEEE Rail Transit Vehicle Interface Standards Committee of the IEEE Vehicular Technology Society, 1999. Accessed January 2011.
- ↑ Public transport impact.[2]. Wikipedia. Retrieved June 2011.
- ↑ Railway signalling, history of block signalling. [3] Wikipedia. Retrieved June 2011.
- ↑ Digital radio shows great potential for Rail[4] Bruno Gillaumin, International Railway Journal, May 2001. Retrieved by findarticles.com in June 2011.
- ↑ San Francisco Airport AirTrain. [5]. Wikipedia. Retrieved June 2011.
- ↑ History of the NEL. [6] Wikipedia. Retrieved June 2011.
- ↑ Design of the Vancouver SkyTrain [7] Wikipedia. Retrieved June 2011.
- ↑ a b Communications in the SelTrac CBTC system[8] Wikipedia. Retrieved June 2011.
- ↑ CBTC radios: What to do? Which way to go? [9] Tom Sullivan, 2005. www.tsd.org. Accessed May 2011.
- ↑ CBTC Projects. [10] www.tsd.org/cbtc/projects, 2005. Accessed June 2011.
- ↑ European Train Control System, ETCS.[11] Wikipedia, Accessed June 2011
- ↑ IEC 62290-1, Railway applications - Urban guided transport management and command/control systems - Part 1: System principles and fundamental concepts.[12] IEC, 2006. Accessed June 2011
- ↑ a b c d Semi-automatic, driverless, and unattended operation of trains.[13] IRSE-ITC, 2010. Accessed through www.irse-itc.net in June2011
- ↑ CITYFLO 650 Metro de Madrid, Solving the capacity challenge.[14] Bombardier Transportation Rail Control Solutions, 2010. Accessed June 2011
- ↑ Madrid´s silent revolution.[15] in International Railway Journal, Keith Barrow, 2010. Accessed through goliath.ecnext.com in June 2011
- ↑ CBTC: más trenes en hora punta.[16] Comunidad de Madrid, www.madrig.org, 2010. Accessed June 2011
- ↑ How CBTC can Increase capacity - communications-based train control. [17] William J. Moore, Railway Age, 2001. Accessed through findarticles.com in June 2011
- ↑ Spread Spectrum.[18] Wikipedia. Accessed June 2011
- ↑ Bombardier to Deliver Major London Underground Signalling.[19] Press release, Bombardier Transportation Media Center, 2011. Accessed June 2011
- ↑ Aliorations techniques, Ligne 13 du Metro de Paris.[20] Wikipedia. Accessed June 2011
Enlaces externos
- http://www.alstom.com
- http://www.ansaldo-sts.com
- http://www.bombardier.com
- http://www.invensys.com
- http://www.siemens.com
- http://www.thalesgroup.com
- http://www.ieee.org
- http://www.railjournal.com
- http://www.tsd.org
- http://www.iec.ch
- http://www.irse-itc.net
- http://www.madrid.org
- http://www.railwayage.com
- http://www.ieee.org
- http://www.bombardier.com/en/transportation/products-services/rail-control-solutions?docID=0901260d8000a67e
- http://www.linkedin.com/
- http://www.linkedin.com/groups?gid=2692452&trk=hb_side_g
Categoría:- Sistemas de señalización y seguridad
-

![Tren CBTC en [Metro de Shenzhen] Línea 3, China](/pictures/eswiki/83/Shenzhenmetro_cityflo650.jpg)





Wikimedia foundation. 2010.