- Ecuación diferencial lineal
-
Ecuación diferencial lineal
Una ecuación diferencial lineal ordinaria es una ecuación diferencial que tiene la forma general y comprensible de escribir la ecuación es de la siguiente forma:

O usando otra notación frecuente:

Vemos que lo que define que una ecuación diferencial sea lineal es que no aparecen productos de la función incógnita consigo misma ni ninguna de sus derivadas. Si usamos la notación
 para denotar el operador diferencial lineal de la ecuación anterior, entonces la ecuación anterior puede escribirse como:
para denotar el operador diferencial lineal de la ecuación anterior, entonces la ecuación anterior puede escribirse como:
Estas ecuaciones tienen la propiedad de que el conjunto de las posibles soluciones tiene estructura de espacio vectorial de dimensión finita cosa que es de gran ayuda a la hora de encontrar dichas soluciones.
Contenido
Ecuación lineal de primer orden
Las Ecuaciones diferenciales de primer orden se caracterizan por ser de la forma:
Donde
 y
y  son funciones continuas en un intervalo
son funciones continuas en un intervalo ![[a,b] \subseteq \mathbb{R}](/pictures/eswiki/102/fd2e6674a7e045de82c086c980ff21c9.png) . La solución de esta ecuación viene dada por:
. La solución de esta ecuación viene dada por:![y(x) =e^{ - \int_{x_0}^x P(x) dx } \left[ y_0 + \int_{x_0}^x Q(x) e^{ \int P(x) dx } dx \right]](/pictures/eswiki/97/a2130c48b2b516bbe1f85c1435299250.png) Resolución detallada
Resolución detalladaEs Posible encontrar una forma explícita para las soluciones de esta ecuación, la idea consiste en encontrar una función
 que nos permita transformar:
que nos permita transformar:
en la derivada de un producto.
Para ello necesitamos que
 . En efecto, si despejamos p(x) e integramos ambos miembros tenemos
. En efecto, si despejamos p(x) e integramos ambos miembros tenemos  dentro de la integral y por resolución de integrales sabemos que es el logaritmo de w(x). Despejar el logaritmo es convertir en exponencial ambos miembros, y así obtenemos
dentro de la integral y por resolución de integrales sabemos que es el logaritmo de w(x). Despejar el logaritmo es convertir en exponencial ambos miembros, y así obtenemos

Ahora si multiplicamos la ecuación diferencial por
obtenemos:

Lo que equivale a escribir:

 Con
Con  .
.Finalmente, todas las soluciones de la ecuación diferencial pueden ser calculadas usando la expresión:

Ecuaciones lineales de orden n
Del mismo modo que se ha definido la ecuación diferencial lineal de primer orden como podemos definir una ecuación diferencial de orden n como:

Donde la derivada mayor que aparece es de orden n-ésimo.
Resolución caso general
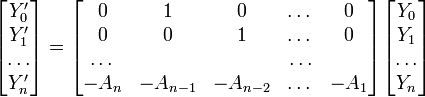
Esta ecuación se dice que es lineal si la función incógnita o sus derivadas no están multiplicadas por si mismas o si tampoco aparecen en forma de funciones compuestas (por ejemplo, sin(y). Una ecuación diferencial lineal de orden superior puede atacarse convirtiéndola en un sistema de n ecuaciones diferenciales de primer orden. Para hacer esto se definen las n funciones incógnita adicionales dadas por:

Puesto que:

El sistema de ecuaciones diferenciales puede escribirse en forma de ecuación matricial como:
Resolución con coeficientes constantes
La resolución de ecuaciones y sistemas de ecuaciones diferenciales se simplifica mucho si las ecuaciones son de coeficientes constantes. En el caso de una ecuación de primer orden la búsqueda de un factor integrante nos lleva en la mayoría de los casos a una ecuación en derivadas parciales. Si la ecuación es de orden superior, a no ser que sea una ecuación de Euler o similar, tendremos que proponer una solución que no viene dada, en general, por funciones elementales. En estos casos los métodos preferidos (sin contar el cálculo numérico) son los que emplean series de potencias o series de Fourier. En el caso de los sistemas, si la matriz del sistema es de coeficientes constantes podemos resolver el sistema usando el método de los valores propios ya que en ese caso la matriz resultante de la reducción de la ecuación a un sistema de primer orden es constante y puede encontrarse fácilmente su solución calculando la exponencia de la matriz del sistema.
Para estudiar otros métodos de encontrar la solución a parte de la exponenciación de matrices consideraremos una ecuación del tipo:

Donde
 son coeficientes constantes conocidos. Observemos que la derivada n-ésima va acompañada por el coeficiente unidad. Definimos el polinomio carácterístico de la ecuación como
son coeficientes constantes conocidos. Observemos que la derivada n-ésima va acompañada por el coeficiente unidad. Definimos el polinomio carácterístico de la ecuación como
que es una ecuación algebraica de orden n. Se demuestra que si hallamos las n raíces
 del polinomio característico la solución de la ecuación homogénea:
del polinomio característico la solución de la ecuación homogénea:
Al calcular las raíces
del polinomio característico pueden darse los siguientes casos:- Raíces reales distintas: En este caso la solución viene dada directamente por
 , donde
, donde  , siendo Ck constantes de integración.
, siendo Ck constantes de integración. - Raíces reales repetidas: Ilustraremos este caso con un ejemplo; sea una ecuación de segundo orden con coeficientes constantes cuyo polinomio carácterístico tiene la raíz λi doble. En este caso no podemos expresar la solución como
 , ya que si lo hacemos de este modo tenemos una información redundante. En este caso particular la solución de la ecuación es
, ya que si lo hacemos de este modo tenemos una información redundante. En este caso particular la solución de la ecuación es  . En general, en una ecuación de orden n, si una raíz
. En general, en una ecuación de orden n, si una raíz  aparece repetida q veces la solución parcial asociada a ella es:
aparece repetida q veces la solución parcial asociada a ella es:
- Raíces complejas: Si las raíces son del tipo
 debemos expresar la solución como combinación lineal de senos, cosenos y exponenciales en la forma
debemos expresar la solución como combinación lineal de senos, cosenos y exponenciales en la forma
![y_k(x) = e^{a_kx}[\cos(b_kx)+ \sin (b_kx)]\,](/pictures/eswiki/55/7af1d32afcea5b009c699be4cd3a5220.png) .
.Si las raíces complejas conjugadas están repetidas, la ecuación es del tipo
![y_k(x) = e^{a_kx}[\sum_{j=1}^q C_j x^{j-1} \cos(b_kx)+ \sum_{j=1}^q C_j x^{j-1} \sin (b_kx)]\,](/pictures/eswiki/52/4b88bfacafca86c27ab5f72058e5aa4f.png) .
.Una vez resuelto el problema homogéneo podemos atacar el problema completo. Para tener la solución del problema completo debemos sumar una solución particular a la solución homogénea ya obtenida:
 .
.Para hallar
 empleamos el método de la conjetura razonable, consistente en analizar el término inhomogéneo de la ecuación y proponer funciones del mismo tipo como solución. Nótese que no es necesario que
empleamos el método de la conjetura razonable, consistente en analizar el término inhomogéneo de la ecuación y proponer funciones del mismo tipo como solución. Nótese que no es necesario que  sea un coeficiente constante.
sea un coeficiente constante.Ejemplos
- Tenemos
 Proponemos
Proponemos  (polinomio de primer orden). Las constantes
(polinomio de primer orden). Las constantes  y
y  quedan determinadas tras aplicar los requerimientos de la ecuación a la solución particular (derivar n veces, multiplicar por
quedan determinadas tras aplicar los requerimientos de la ecuación a la solución particular (derivar n veces, multiplicar por  coeficientes constantes, etc.).
coeficientes constantes, etc.). - Tenemos
 . Proponemos
. Proponemos  . Las constantes y se determinan como en el ejemplo 1.
. Las constantes y se determinan como en el ejemplo 1.
Ecuaciones lineales generales de segundo orden
Las ecuaciones lineales de coeficientes constantes tienen una resolución elemental. Dada una ecuación diferencial del tipo:
La solución general tiene la forma:

Donde λ1,λ2 son las soluciones de la ecuación aλ2 + bλ + c = 0. Cuando los coeficientes no son constantes sino funciones analíticas es posible usar la teoría de Frobenius, este procedimiento consiste en desarrollar en serie de Taylor los coeficientes:

Agrupando los términos por potencias en la variable x se obtiene la siguiente expresión:
![\sum_{m=0}^\infty \left(
\sum_{n=0}^m [(n+2)(n+1)a_m y_{n+2-m} + (n+1)b_m y_{n+1-m} + c_m y_{n-m}]
\right) x^m = 0](/pictures/eswiki/56/8282e6f30ccace259260ad97d275711a.png)
Por lo que las soluciones se obtienen a partir de la ecuación de recurrencia:
![\sum_{n=0}^m [(n+2)(n+1)a_m y_{n+2-m} + (n+1)b_m y_{n+1-m} + c_m y_{n-m}] = 0](/pictures/eswiki/54/631cd55edfbbe65c71c040f096ece11a.png)
Ecuaciones lineales en física
En otros contextos
- Ecuación diferencial de Euler o de Cauchy
- Ecuación diferenical de Hermite
- Ecuación diferencial de Laguerre
Véase también
- Ecuaciones differenciales de primer orden
- Ecuaciones diferenciales ordinarias
- Ecuaciones diferenciales
Enlaces externos
Categoría: Ecuaciones diferenciales - Raíces reales distintas: En este caso la solución viene dada directamente por
Wikimedia foundation. 2010.