- Ángulos de Euler
-
- Este artículo trata de los ángulos de Euler de la teoría matemática de rotaciones. Para el uso de la palabra en aeronáutica ver ángulos de navegación
Los ángulos de Euler constituyen un conjunto de tres coordenadas angulares que sirven para especificar la orientación de un sistema de referencia de ejes ortogonales, normalmente móvil, respecto a otro sistema de referencia de ejes ortogonales normalmente fijos.
Fueron introducidos por Leonhard Euler en mecánica del sólido rígido para describir la orientación de un sistema de referencia solidario con un sólido rígido en movimiento.
Contenido
Definición
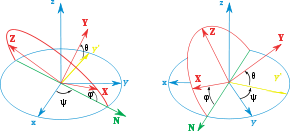
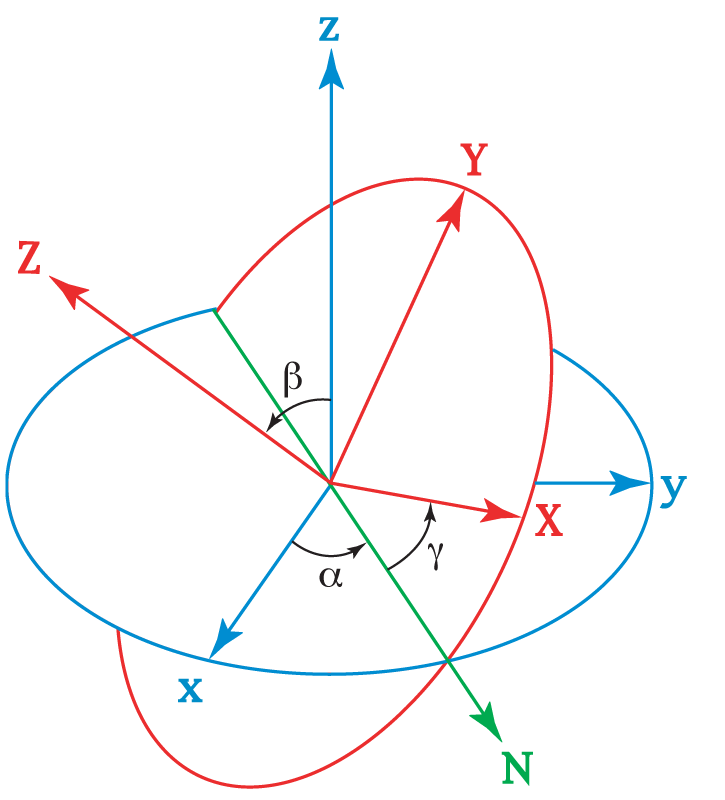
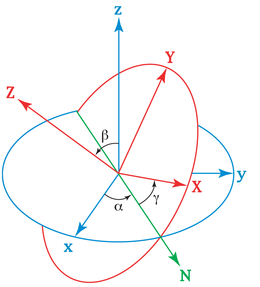 Dos sistemas ortogonales en el que se muestran los ángulos de Euler.
Dos sistemas ortogonales en el que se muestran los ángulos de Euler.
Dados dos sistemas de coordenadas xyz y XYZ con origen común, es posible especificar la posición de un sistema en términos del otro usando tres ángulos α, β y γ.
La definición matemática es estática y se basa en escoger dos planos, uno en el sistema de referencia y otro en el triedro rotado. En el esquema adjunto serían los planos xy y XY. Escogiendo otros planos se obtendrían distintas convenciones alternativas, las cuales se llaman de Tait-Bryan cuando los planos de referencia son no-homogéneos (por ejemplo xy y XY son homogéneos, mientras xy y XZ no lo son).
La intersección de los planos escogidos se llama línea de nodos, y se usa para definir los tres ángulos:
-
- α es el ángulo entre el eje x y la línea de nodos.
- β es el ángulo entre el eje z y el eje Z.
- γ es el ángulo entre la línea de nodos y el eje X.
La intersección de los planos coordenados xy y XY se llama línea de nodos. Más adelante se establecerá que los tres ángulos de Euler descritos son los valores de las tres rotaciones intrínsecas que describen el sistema.
Notar que también se considera la notación: α = ϕ, γ = ψ y β = θ
Relación con los movimientos de rotación
Rotaciones de Euler
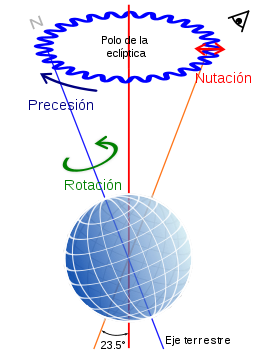 Rotaciones de Euler de la tierra. Rotación intrínseca en verde, Precesión en azul y Nutación en rojo.
Rotaciones de Euler de la tierra. Rotación intrínseca en verde, Precesión en azul y Nutación en rojo.Son los movimientos resultantes de variar uno de los ángulos de Euler dejando fijos los otros dos. Tienen nombres particulares:
Este conjunto de rotaciones no es ni intrínseco ni extrínseco en su totalidad, sino que es una mezcla de ambos conceptos. La precesión es extrinseca, la rotación intrínseca lógicamente intrínseca, y la nutación es una rotación intermedia, alrededor de la línea de nodos.
Cumplen la siguiente propiedad. Si escribimos la rotación de ángulos (ϕ,θ,ψ) como una composición de éstas tres rotaciones:

entonces se cumple:
- A(δϕ + ϕ,θ,ψ) = P(δϕ)A(ϕ,θ,ψ)
- A(ϕ,δθ + θ,ψ) = N(ϕ,δθ)A(ϕ,θ,ψ)
- A(ϕ,δ,δψ + ψ) = R(ϕ,θ,δψ)A(ϕ,θ,ψ)
Como consecuencia de estas propiedades, estas rotaciones son commutativas entre ellas:

lo cual también podría verse intuitivamente usando la analogía entre los ángulos de Euler y los de un soporte Cardán
Otros sistemas de rotaciones equivalentes
Con unas condiciones iniciales determinadas, los ángulos de Euler son equivalentes a una composición de rotaciones:
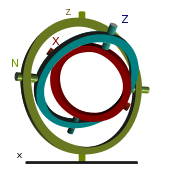 Soporte cardán mostrando ángulos de Euler. El marco externo y el eje externo 'x' no se muestran. Los ejes Y son perpendiculares a cada anillo.
Soporte cardán mostrando ángulos de Euler. El marco externo y el eje externo 'x' no se muestran. Los ejes Y son perpendiculares a cada anillo. Composición según rotaciones intrínsecas. Este tipo de descomposición en rotaciones intrínsecas no es commutativo.
Composición según rotaciones intrínsecas. Este tipo de descomposición en rotaciones intrínsecas no es commutativo.- Ejes de rotación en Cardán: Sean los sistemas XYZ y xyz idénticos inicialmente, restringidos a movimientos de cardán como los del dibujo.
- Rotar el sistema XYZ alrededor de su único eje posible z en α; el sistema xyz no se mueve.
- Rotarlo alrededor de su único eje posible (línea de nodos) por β.
- Rotarlo respecto al eje Z por γ.
- Ejes de rotación extrinsecos Sean los sistemas XYZ y xyz idénticos inicialmente.
- Rotar el sistema XYZ alrededor del eje z en α; el sistema xyz no se mueve.
- Rotarlo alrededor del eje x por β.
- Rotarlo respecto al eje z por γ.
- (Note que el primero y el tercer ejes son idénticos.)
- Ejes de rotación intrínsecos (móviles) Empezar con el sistema XYZ igual al sistema xyz.
- Rotar el sistema XYZ respecto al eje Z en γ; el sistema xyz no se mueve.
- Rotarlo respecto al ahora rotado eje X por β.
- Rotarlo ahora respecto al doblemente rotado eje Z por α.
- (Nota que los ángulos están en orden inverso.)
Estos tres ángulos α, β, γ son los ángulos de Euler. La equivalencia de estas tres definiciones se verifica abajo.
Algunos autores denominan a los ángulos de Euler (α, β, γ) como (ψ, θ, φ)
Tensores (Matrices) de rotación
Basándonos en la relación entre los ángulos de Euler y el movimiento de los soportes de Cardano, podemos ver que todo sistema de coordenadas puede describirse con los tres ángulos de Euler. Si llamamos
![[\mathbf{R}]](6/c86a8bef24b06a29904f3b455de6cf66.png) a la matriz de rotación tridimensional que representa la transformación de coordenadas desde el sistema fijo al sistema móvil, el teorema de Euler sobre rotaciones tridimensionales, afirma que existe una descomposición única en términos de los tres ángulos de Euler:
a la matriz de rotación tridimensional que representa la transformación de coordenadas desde el sistema fijo al sistema móvil, el teorema de Euler sobre rotaciones tridimensionales, afirma que existe una descomposición única en términos de los tres ángulos de Euler:
La velocidad angular Ω de un sólido rígido expresada en términos de los ángulos de Euler viene dada por:
Ángulos de Tait-Bryan
- Artículo principal: Ángulos de navegación
 Ángulos de Tait-Bryan según convención ZXY definidos estáticamente.
Ángulos de Tait-Bryan según convención ZXY definidos estáticamente.Muchas veces en ingeniería aeronáutica se utiliza el nombre de ángulos de Euler para hablar de los ángulos que en geometría se conocen como ángulos de Tait-Bryan (por el matemático escocés Peter Guthrie Tait)
Estos ángulos se prefieren en aeronáutica porque le asignan un ángulo de inclinación cero a un avión en horizontal, a diferencia de los ángulos de Euler, que le asignarían PI/2. Éstos ángulos también definen una rotación de forma única alrededor de cada uno de los ejes intrínsecos del objeto. Sin embargo, como ambas son formas de expresar la orientación de un cuerpo, existe una relación entre ellos; pudiéndose expresar unos en función de otros mediante una matriz de transformación.
La matriz de cambio de base del sistema rotado, dados sus ángulos de Tait-Bryan es:
 ,
,
Algunas veces se los suele llamar incorrectamente "Ángulos de Euler", creando confusión con la terminología usada en matemática.
Enlaces externos
- Weisstein, Eric W. «Euler Angles» (en inglés). MathWorld. Wolfram Research.
 Wikimedia Commons alberga contenido multimedia sobre Ángulos de EulerCommons.
Wikimedia Commons alberga contenido multimedia sobre Ángulos de EulerCommons.
Categorías:- Mecánica del sólido rígido
- Simetría rotacional
- Simetría euclidiana
- Ángulos



![[\mathbf{R}] =
\begin{bmatrix}
1 & 0 & 0 \\
0 & \cos \theta & \sin \theta\\
0 & -\sin \theta & \cos \theta \end{bmatrix}
\begin{bmatrix}
\cos \phi & 0& -\sin \phi \\
0 & 1 & 0\\
\sin \phi & 0& \cos \phi
\end{bmatrix}
\begin{bmatrix}
\cos \psi & \sin \psi & 0 \\
-\sin \psi & \cos \psi & 0 \\
0 & 0 & 1 \end{bmatrix}](c/51c1aec1d32c818ad17f39b6e6467f9e.png)
![[\boldsymbol{\Omega}] = \begin{Bmatrix} \Omega_1 \\ \Omega_2 \\ \Omega_3 \end{Bmatrix} =
\begin{Bmatrix} \dot\theta \cos\psi + \dot\phi \sin\theta \sin\psi \\
-\dot\theta \sin\psi + \dot\theta \sin\theta \cos\psi \\
\dot\psi + \dot\phi \cos\theta \end{Bmatrix}](b/84b2e90be4e734d194bd7146a11f2519.png)

Wikimedia foundation. 2010.